SOLID MODELLaser Cutting & Engraving26-May-2026
MR6 robot modified for autonomous operation.
paulie_c
2 Files
stl Format
+1
Description
-------------------------------------------------- Introduction ----------------------------------------------
The MR6 differential drive robot is based upon the hardware design by thingiverse user timmiclark. All links
provided below are current as of 8th February 2026.
#
Aim is to achieve autonomous navigation tasks including object and hazard avoidance, line following and platform
to platform communication (where more than one robot is involved).
#
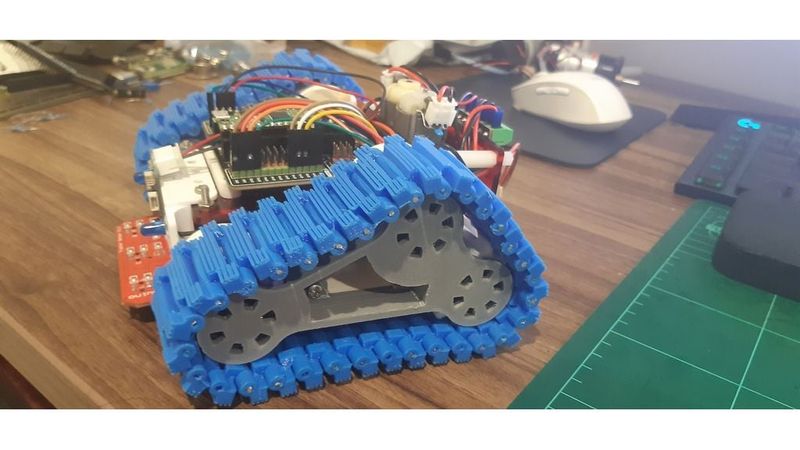
Robot chassis design.
Requires access to a FDM 3d printer (or outsource based on available .3mf / .stl files)
- https://www.thingiverse.com/thing:2753227
#
modifications/additions include:
#
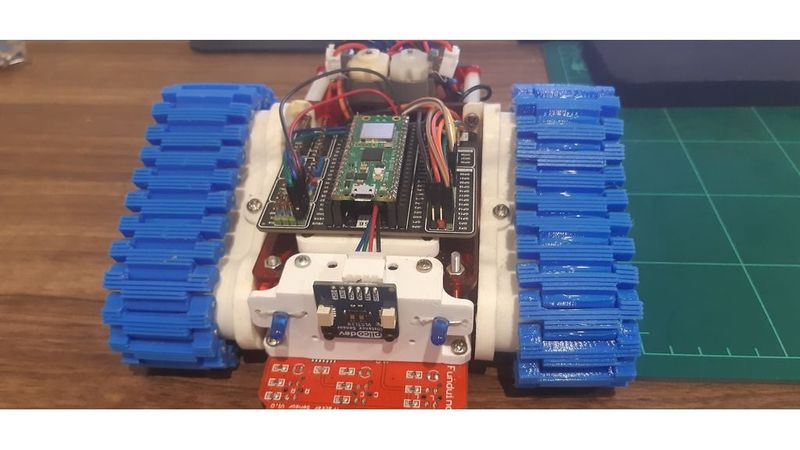
MicroController: Raspberry pico W. More info available via:
- https://www.raspberrypi.com/documentation/microcontrollers/pico-series.html
#
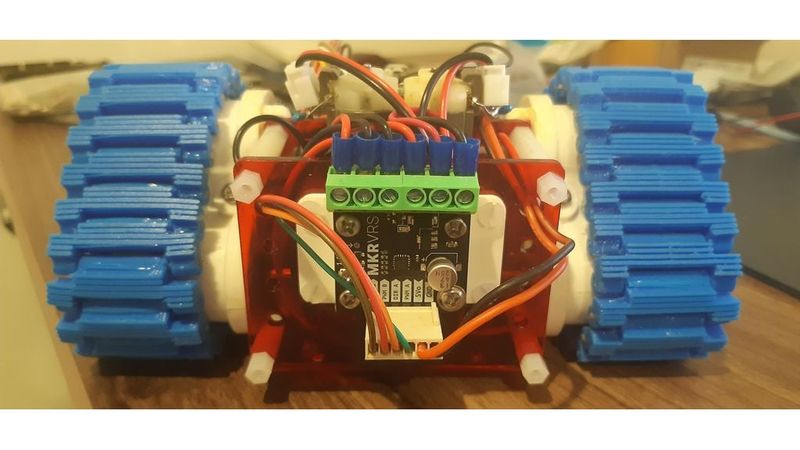
DC brushed low power Motor Driver: Makerverse Motor Driver 2 Channel
- https://core-electronics.com.au/makerverse-motor-driver-2-channel.html
#
Laser rangefinder: PiicoDev Laser Distance Sensor VL53L1X breakout module -
- https://core-electronics.com.au/piicodev-laser-distance-sensor-vl53l1x.html
#
Port expansion board for Raspberry pi Pico microcontroller.
- https://www.dfrobot.com/product-2393.html or
- https://core-electronics.com.au/gravity-expansion-board-for-raspberry-pi-pico.html
#
Line tracing IR emitter/detector trio.
https://www.jaycar.com.au/duinotech-arduino-compatible-triple-reflectance-sensor-module/p/XC4611
#
DC Motors and gearbox.
- https://www.tamiya.com/english/products/70097/index.html
#
Misc.
2 x LEDs and 330ohm resistors, hook-up wire, M3 screws, JST and crimp terminals.
#
Addition of mounting components for the laser rangefinder and motor driver (see accompanying stl files as part of this remix).
---------------------------------------------------------------------------------------------------------------
Decided to make two of these as I had the parts lying around and embarked on this as a side project.
Current program allows for cliff detection, obstacle avoidance and line following.
To Do: Transmit status messages to a 'home base' via local network.
Implement fellow robot seeking and locating behaviour - i.e find a friend.
Note: Program is still a work in progress as of May 26 2026. More to come!