Dumrobot
Description
DumBot13 - Open Source 3D Printed Humanoid Robot
License: CC BY-NC-SA 4.0 | GitHub Stars: ⭐
> A Fully 3D-Printed Humanoid Robot Platform | Complete with Just a Bambu Lab A1 | Unbeatable Value
Designed and open-sourced by Zyuon Robotics
[🤖 Robot Design Files] | [🎬 Watch Demo on Bilibili] | [🌐 MakerWorld Project: DumBot13-Makerworld]
📋 Table of Contents
1. [Project Overview](#project-overview)
2. [Why Choose This Project?](#why-choose-this-project)
3. [Quick Start](#quick-start)
4. [Robot Specifications](#robot-specifications)
5. [Mechanical Design Details](#mechanical-design-details)
6. [Non-3D-Printed Parts](#non-3d-printed-parts)
7. [Embedded System & Electronics](#embedded-system--electronics)
8. [Cost Breakdown](#cost-breakdown)
9. [Open Source Software Ecosystem](#open-source-software-ecosystem)
10. [FAQ](#faq)
11. [Contributing & Acknowledgments](#contributing--acknowledgments)
12. [License](#license)
🤖 Project Overview
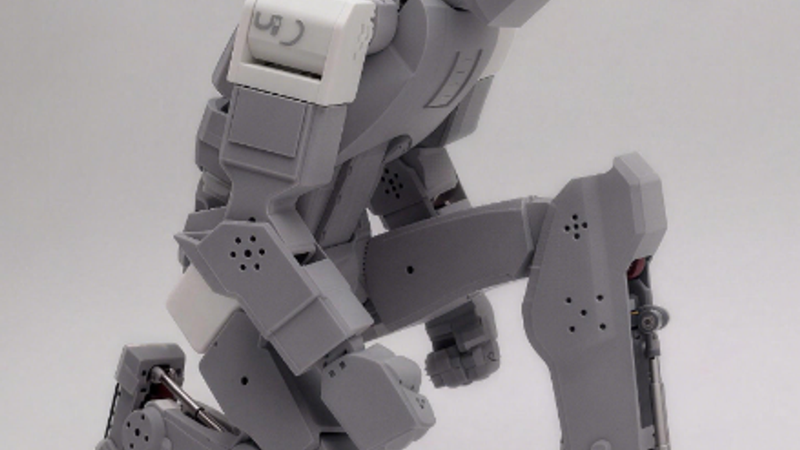
DumBot13 is a humanoid robot platform designed from scratch and fully open-sourced by Zyuon Robotics.
Unlike most commercially available solutions that rely on expensive CNC machining, DumBot13 achieves over 99% 3D-printed structural components. From load-bearing skeletons to bionic shells, from hip joints to complex ankles—all 80+ independent structural parts can be easily manufactured using widely available consumer-grade FDM 3D printers. While minimizing hardware manufacturing barriers, our clever structural design ensures the rigidity required for complex motion control.
Our Core Philosophy:
> "Do more complete things at lower cost."
The current open-source humanoid robot community often faces two extremes:
| Challenge | Description |
|-----------|-------------|
| 💰 High Cost | Prices reaching tens of thousands of yuan, excluding most developers, students, and researchers |
| 🧪 Low Completeness | Only basic walking demos available, lacking callable low-level control and upper-level software ecosystems |
DumBot13 aims to break this deadlock.
Our Ultimate Goal:
Enable any developer with a 3D printer to replicate a highly complete humanoid robot (both hardware and software) at a disruptive low cost. Paired with our simultaneously open-sourced complete software architecture, you can skip tedious groundwork and jump straight into secondary development—exploring gait algorithm validation, hardware-software decoupling design, and the endless possibilities of embodied AI.
<div align="center">
🙏 Greeting Pose | 🚶 Outdoor Walking | 👋 Waving
</div>
🚀 Quick Start
Here's an overview of the core steps to assemble a complete DumBot13. Each step links to detailed sections below:
1. Purchase Materials
> TODO: Add BOM (Bill of Materials)
2. Print Parts
- Download all print files from MakerWorld: DumBot13-Makerworld
- All parts fit within a 256mm³ build volume—a single Bambu Lab A1 can complete all printing
- Recommended material: PETG (see Ultimate 3D Printing Compatibility section)
3. Assembly
Follow this sequence (detailed in Mechanical Design Details):
| Module | Key Steps |
|--------|-----------|
| Torso | Print skeleton + shell, install main controller and battery compartment |
| Pelvis/Waist | Install waist motor and hip connection components |
| Legs | Install thigh, shin, ankle motors, and linkage transmission |
| Arms | Install shoulder, upper arm, forearm, and fist |
| Head | Install shell and sensors (optional) |
💡 Budget-conscious or just validating leg algorithms? Adopt the "Lower Body Only" assembly approach (legs + pelvis). See Flexible Assembly Options for details.
4. Deploy Software
- Clone the `humanoid-control` repository on LubanCat 4
- Configure Docker image and execute commands
- See Open Source Software Ecosystem for details
✨ Why Choose This Project?
🔹 Ultimate 3D Printing Compatibility
Designed with "printability" as the top priority from day one:
- Optimized Structure: All parts engineered for FDM printing processes to improve success rates and reduce assembly difficulty
- A1-Ready: All parts fit ≤256mm³ build volume—theoretically completable with a single Bambu Lab A1 (we used P2S/X2D during development for efficiency, but they're not required)
- 100% Bambu Lab Ecosystem: All slicing and testing done on Bambu P2S, X2D, and A1; provided 3MF files are optimized for Bambu printers
Printer Compatibility Test Results:
| Printer Model | Compatibility | Notes |
|---------------|---------------|-------|
| Bambu Lab A1 | ✅ Fully Compatible | All parts printable on single unit; build volume fully sufficient |
| Bambu Lab P2S | ✅ Fully Compatible | Primary development machine |
| Bambu Lab X2D | ✅ Fully Compatible | Primary development machine |
| Other Bambu Models | ✅ Theoretically Compatible | Not tested on non-Bambu machines |
> 📌 Project optimized for 256×256×256mm build volume. One A1 can print the entire robot (patience required!).
🔹 Exceptional Completeness
This isn't just a "barely standing" demo—it's a complete ecosystem spanning hardware design to algorithm deployment:
| Dimension | Content |
|-----------|---------|
| Mechanical Design | Full humanoid structure: head, torso, dual arms, dual legs; 20+ DOF (see specs below) |
| 3D Print Files | Pre-configured 3MF files + STEP engineering source files, ready to use |
| Embedded Firmware | PCB designs and code for power, control, and communication boards |
| RL Training Code | `humanoid-env` training framework |
| Real-World Deployment | `humanoid-control` deployment framework |
Thanks to this full-stack, modular completeness, whether you're an algorithm researcher, hardcore maker, or embedded developer, you can quickly find your entry point and focus on personalized customization.
🔹 Unbelievable Value
Compared to existing open-source humanoid projects, DumBot13 achieves order-of-magnitude cost reduction. Core costs focus on two key components: main controller and servo motors (see Cost Breakdown). Previously expensive mechanical structures are elegantly solved via 3D printing. Through continuous hardware-software co-optimization and algorithm iteration, we achieve highly agile, human-like motion control within extreme cost constraints.
🔹 Flexible Assembly Options
Limited budget? Only want to validate leg algorithms? Adopt the "Lower Body Only" (legs + pelvis) lightweight configuration to significantly reduce arm motor costs. This modular flexibility is unmatched by traditional fixed-form robots. Plus, with fully open-sourced structural files and 3D printing, you can effortlessly expand with personalized equipment (sensors, etc.) for diverse project possibilities.
📊 Robot Specifications
| Parameter | Value |
|-----------|-------|
| Total DOF | 21/23 DOF |
| Leg DOF (each) | 6 DOF |
| Arm DOF (each) | 4-5 DOF |
| Waist DOF | 1 DOF |
| Head DOF | None (future: 1 DOF planned) |
| Height | ~120 cm |
| Weight | ~17 kg |
| Actuators | Damiao (DM) Brushless Servo Motors (4310 / 4340) |
| Main Controller | LubanCat 4 |
| Structural Material | PETG |
| Non-Printed Parts | Rocker arms (CNC aluminum), linkages (off-the-shelf), fasteners, bearings |
| Compatible Printers | Bambu Lab A1 / P2S / X2D (recommended; other Bambu models compatible) |
⚙️ Mechanical Design Details
Overall Architecture
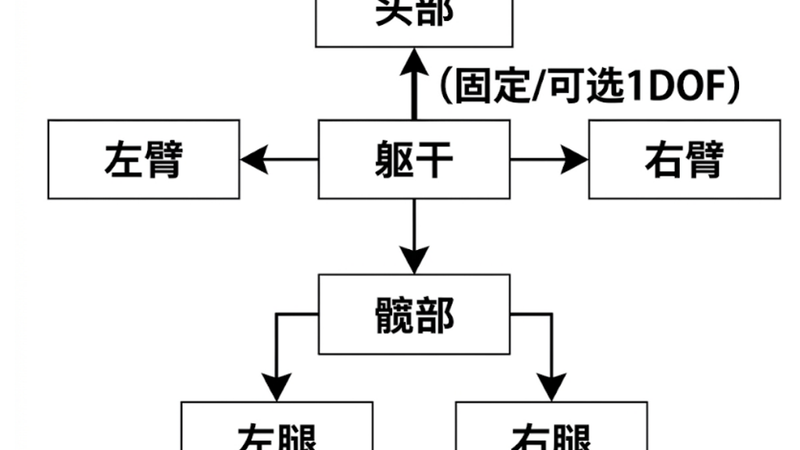
The robot uses a classic serial-joint humanoid architecture centered on the torso:
- Upward: Connects to head
- Sides: Connects to left/right arms
- Downward: Connects to pelvis, which branches to left/right legs
```
[Head]
|
[Torso] ←→ [Left Arm] [Right Arm]
|
[Pelvis/Waist]
├── [Left Leg]
└── [Right Leg]
```
Leg Joint & Motor Configuration
Each leg has 3 joints driven by 6 motors (6 DOF total):
| Joint | Motor Count | Motion & Motor Model |
|-------|-------------|---------------------|
| Hip | 3 | Pitch (DM4340) + Roll (DM4340) + Yaw (DM4310) |
| Knee | 1 | Pitch (DM4340) |
| Ankle | 2 | Pitch (DM4340) + Roll (DM4340) |
Kinematic Chain: Hip → Thigh → Knee → Shin → Ankle → Foot
Arm Joint & Motor Configuration
Each arm has 3 joints driven by 4-5 motors (4-5 DOF):
| Joint | Motor Count | Motion & Motor Model |
|-------|-------------|---------------------|
| Shoulder | 3 | Pitch (DM4310) + Roll (DM4310) + Yaw (DM4310) |
| Elbow | 1 | Pitch (DM4310) |
| Wrist | 1 (optional) | Roll (DM4310) |
Kinematic Chain: Shoulder → Upper Arm → Elbow → Wrist (optional) → Fist
Module Breakdown
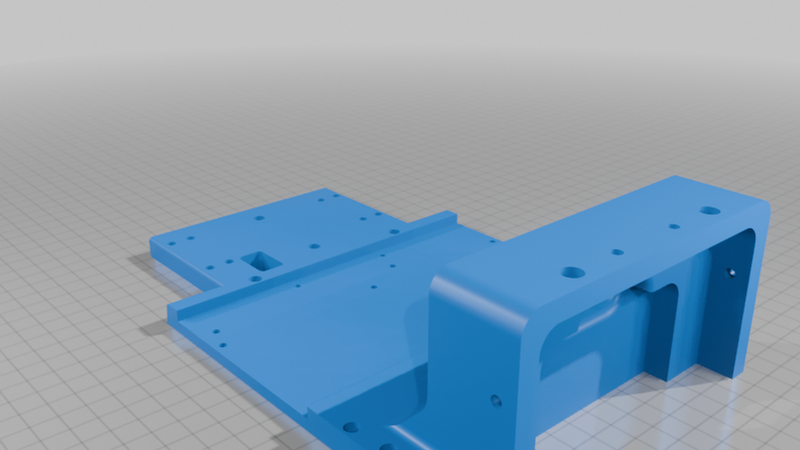
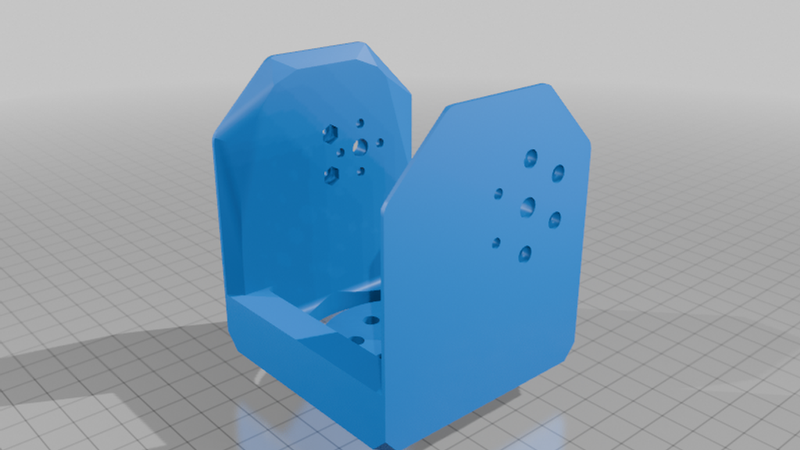
🧱 Torso Module
The torso is the core structural component, supporting the main controller, battery, and all upper-body loads. We use a skeleton + shell layered design:
- Torso Skeleton (Front/Rear): Load-bearing structure; print with 100% infill or 4 walls @ 40% infill to evenly distribute joint reaction forces
- Torso Shells (1-4): Decorative/protective outer shells; print in any color to match your preference
- Corner Brackets: 5 types of bracket parts to connect and reinforce torso panel junctions
- Battery Compartment: Integrated inside torso with dedicated battery mount for quick swaps
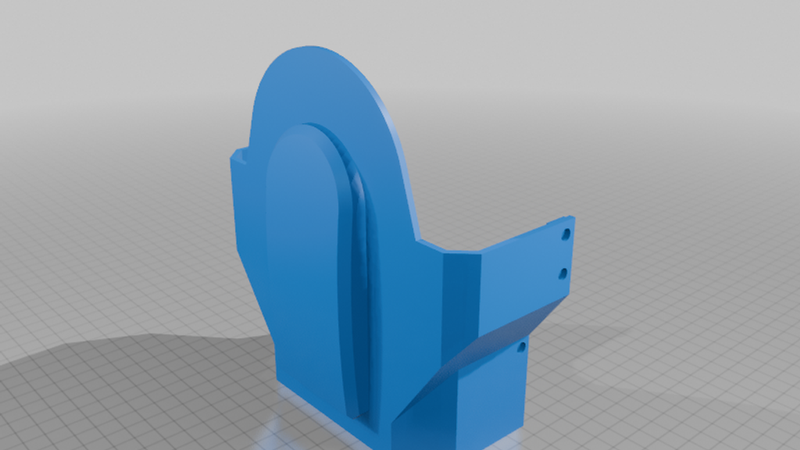
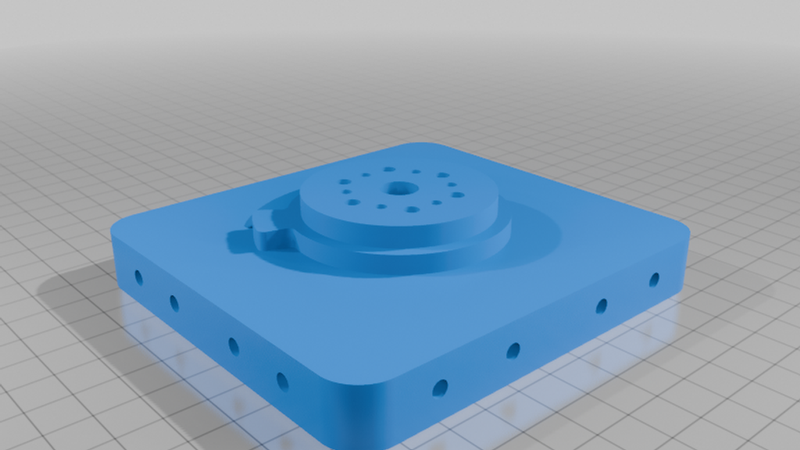
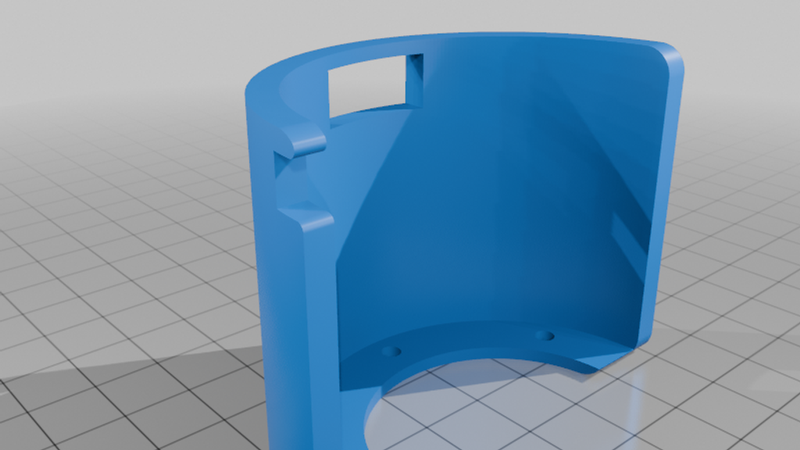
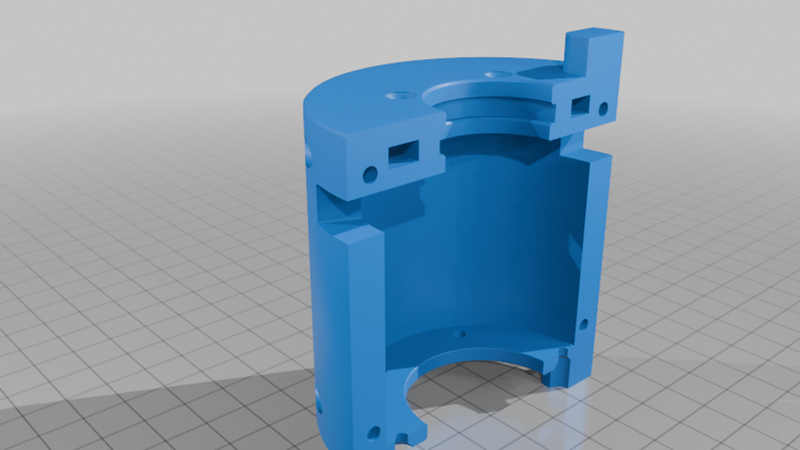
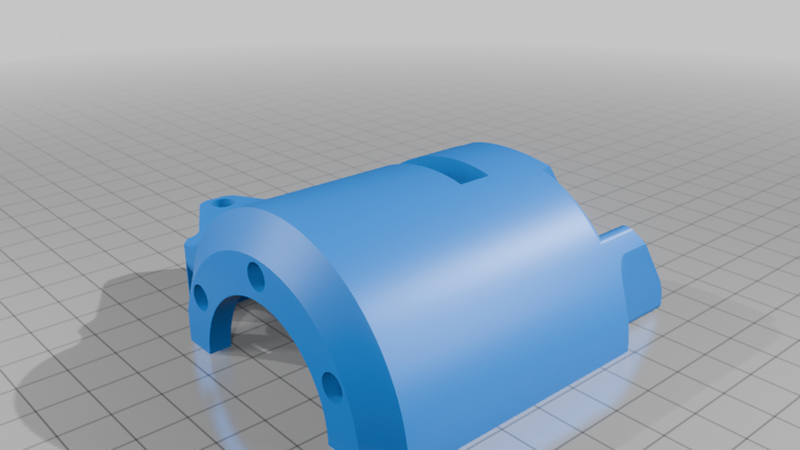
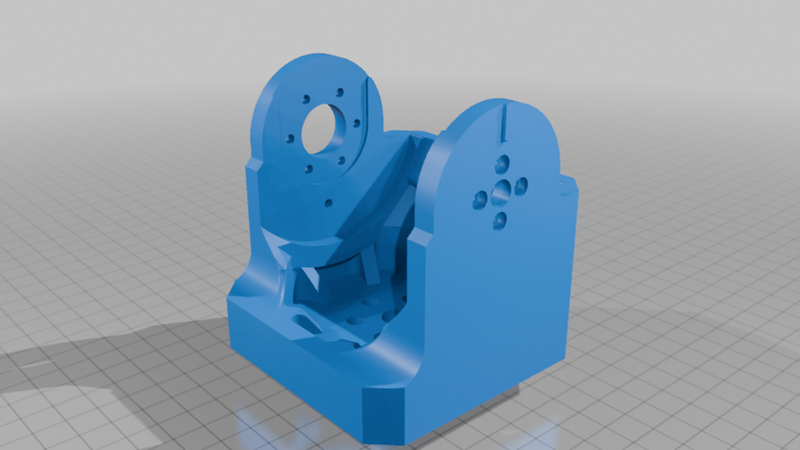
🔄 Pelvis & Waist Module
The pelvis handles the highest mechanical loads—supporting the entire upper body while providing pitch rotation for the legs.
- Waist Structure: Provides torso yaw rotation; uses deep-groove ball bearings (structural optimization eliminates need for crossed roller bearings); driven by DM4340 motor
- Hip-Thigh Connectors: Mount motors for leg pitch rotation; connect pelvis to lower limbs
- Hip Joint Shells (Front/Rear): Enclose hip joint assembly; front and rear shells clamp together for secure fit
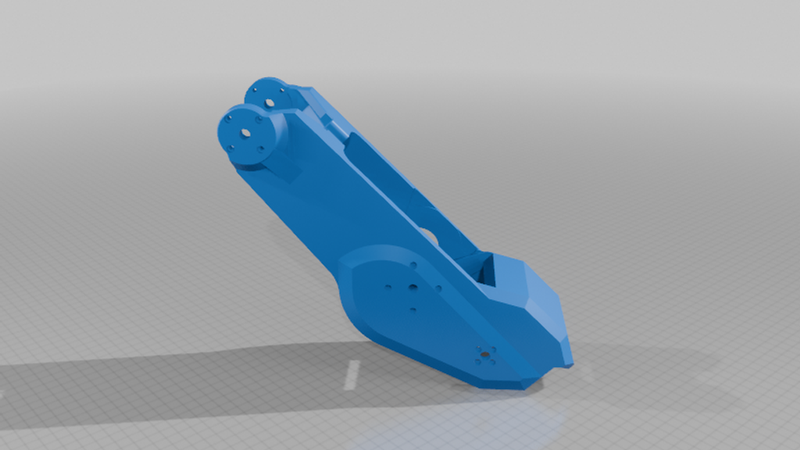
🦵 Legs Module
Each leg features 6 DOF forming a complete serial kinematic chain from hip to ankle. Simplified design reduces part count and assembly complexity:
- Thigh: Single-piece printed structure; integrates knee motor mount and hip connection—reduces cumulative error from multi-part assembly
- Shin: Single-piece printed structure (most complex leg part). Ankle pitch motor transmits motion via internal linkage:
- Linkage ends connect to rod-end bearings; upper end connects via rocker arm to ankle pitch motor; lower end connects to ankle roll motor
- This linkage + rod-end bearing transmission reduces assembly precision requirements while ensuring smooth joint motion
- Foot Assembly: Includes footplate, heel, and pull-tabs; connects to shin via ankle roll motor
Legs are left/right symmetric. Each leg requires only two main structural prints (thigh + shin), dramatically lowering printing and assembly barriers.
💪 Arms Module
Each arm has 4-5 DOF with similarly simplified design:
- Shoulder Assembly: Connects torso to arm; houses shoulder pitch and roll motors
- Upper Arm: Single-piece print connecting shoulder to elbow; includes elbow pitch motor mount
- Forearm: Single-piece print with optional wrist roll motor mount
- Fist: End-effector, 3D printed; easily swappable for custom tools/grippers
Arms are left/right symmetric.
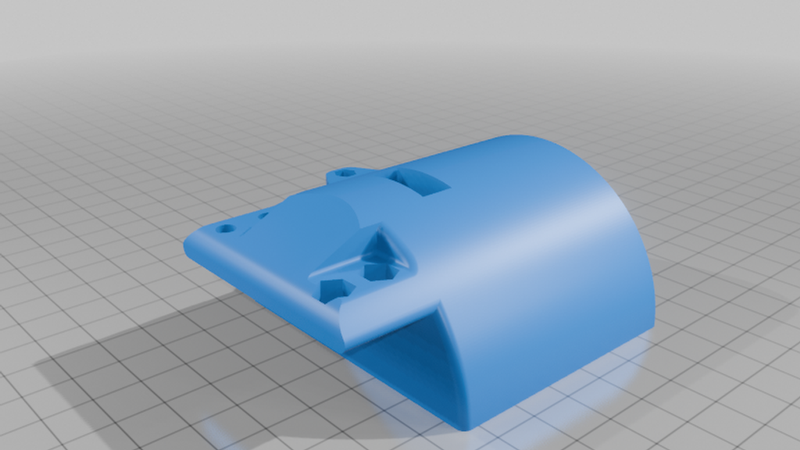
🧠 Head Module
Two-piece shell design; interior accommodates small sensors or camera modules. Current version has no servo DOF, but can be easily modified to add 1 yaw DOF if needed.
🔧 Non-3D-Printed Parts
While >99% of parts are 3D printable, a few components require external sourcing:
| Part | Manufacturing Method | Notes |
|------|---------------------|-------|
| Rocker Arms | CNC (Aluminum) | Connects ankle pitch motor output shaft to rod-end bearings; requires high strength/precision. Affordable via JLCPCB, QuanZhou, etc. |
| Linkages | Off-the-shelf standard parts | Auxiliary linkages for certain joints; available from hardware suppliers |
| Fasteners | Standard hardware | M3/M4 bolts, nuts, washers, etc. |
| Bearings | Standard bearings | Deep-groove ball bearings, etc. |
💻 Embedded System & Electronics
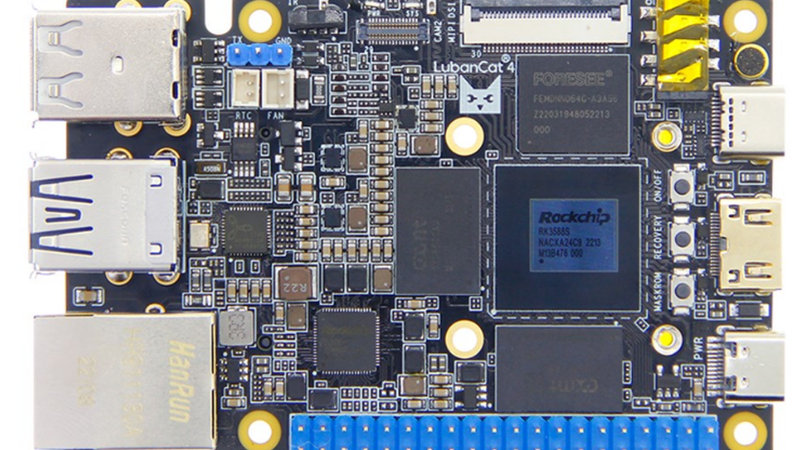
Main Controller: LubanCat 4
A high-performance Chinese SBC based on Rockchip RK3588, providing powerful compute for the robot:
- CPU: Quad Cortex-A76 + Quad Cortex-A55
- NPU: 6 TOPS for on-device AI inference
- Interfaces: Rich GPIO, UART, CAN, SPI—perfect for robot control
- OS: Supports Ubuntu/Debian; runs ROS 2 natively
We use an external RTL8822CE module for wireless communication; requires a mini PCIe half-height to full-height bracket.
Drive Motors: Damiao (DM) Brushless Servo Motors
Two motor models used throughout:
| Model | Application | Qty (Full Body) | Qty (Legs Only) |
|-------|-------------|-----------------|-----------------|
| DM4340 | High-torque joints: hips, knees | 10 | 10 |
| DM4310 | Shoulders, elbows, ankles | 11 | 2 |
🔗 [Buy DM4310] | [Buy DM4340]
Damiao motors support CAN bus communication, offering high-precision position feedback, torque control, and fast response—ideal for robotic joint actuation.
Electronics Architecture Diagram
(Diagram placeholder – refer to repository for detailed schematics)
💰 Cost Breakdown
DumBot13 delivers exceptional hardware value: complete robot under ¥18,000 RMB (~$2,500 USD). Approximate cost breakdown:
| Item | Model/Spec | Approx. Cost (RMB) | Notes |
|------|-----------|-------------------|-------|
| Main Controller | LubanCat 4 | ¥1,200 | Largest single expense |
| CAN Communication Board | DM-MC02 Robot Dev Board | ¥200 | Alternative comms solutions possible; requires ≥3x FDCAN |
| Motors ×21 | DM4340 ×10 + DM4310 ×11 | ¥14,600 | Core cost; reduce with legs-only config |
| Power Board | JLCPCB prototype | ¥200 | Requires manual soldering; future pre-assembled option planned |
| 3D Printing Filament | PETG ~8-10 kg | ~¥300 | Extremely low manufacturing cost |
| CNC Parts | Aluminum rocker arms | ~¥100 | Only externally processed part |
| Fasteners & Bearings | Standard hardware | ~¥200 | Very low cost |
| Battery | 48V pack | ¥600 | Customizable via Taobao vendors |
| Miscellaneous | Linkages, wires, connectors | ~¥100 | |
💡 Legs-Only Configuration: Assemble lower body only (legs + pelvis) to eliminate 8× DM4310 arm motors—significant cost savings.
> 📊 Compared to similar open-source humanoid projects, DumBot13 costs only 1/3 to 1/5 as much—currently the most cost-effective open-source humanoid solution available.
🧩 Open Source Software Ecosystem
Our open-source commitment extends beyond mechanics—we provide a complete software stack:
| Module | Description | Repository |
|--------|-------------|------------|
| Control Framework | ROS 2-based robot control: joint control, motion commands, etc. | humanoid-control |
| Training Framework | Pure RL walking, BeyondMimic training environments | humanoid-env |
| Retargeting Framework | Convert SMPL, BVH, and other motion capture formats to arbitrary robot configurations | humanoid-retargeting |
| Robot Description Format | Custom HRDF format, redesigned for humanoid robots | humanoid-robot-description |
❓ FAQ
Q: Must I use a Bambu Lab printer?
A: Our testing and optimization were done on Bambu machines. Theoretically, other FDM printers can work, but you may need to adjust parameters. We strongly recommend Bambu printers for best results.
Q: Is a single A1 really enough?
A: Yes. All parts are designed ≤256mm³. Our build volume claims are thoroughly validated.
Q: Can I skip CNC for rocker arms?
A: Not recommended. Rocker arms transmit critical motor torque; 3D-printed layer adhesion may fail under sustained high torque. CNC aluminum rocker arms are inexpensive (~¥50-100 via JLCPCB/QuanZhou).
Q: Can I print with PLA?
A: Suitable for prototyping. However, PLA's creep properties may cause joint loosening during long-term use. We recommend PETG or ABS for final builds.
Q: How do I get technical support?
A: Currently, ask questions in the project's GitHub Issues. We plan to establish an official WeChat discussion group soon.
🤝 Contributing & Acknowledgments
This project is designed and developed by Zyuon Robotics.
We welcome contributions via:
- 🐛 Submitting Issues for bug reports and suggestions
- 🔀 Submitting Pull Requests to improve designs
- 📸 Sharing your assembly process and creative modifications
📜 License
- Mechanical Design Files: CC BY-NC-SA 4.0
- Software Repositories: Each follows its respective license; see individual GitHub repos for details.
> 🌐 English Summary: DumBot13 is a fully open-source, 3D-printable humanoid robot platform designed for accessibility and completeness. With >99% printable parts, compatibility with entry-level printers like the Bambu Lab A1, and a full software stack (ROS 2, RL training, deployment tools), it empowers developers worldwide to build, customize, and innovate on human-scale robotics—at a fraction of traditional costs.
Last Updated: 2026 | Designed by Zyuon Robotics 🤖✨