SOLID MODELAI & Computer Vision2-May-2026
Robot Lower Leg
Cyber-Katie
2 Files
stl Format





+5


Description
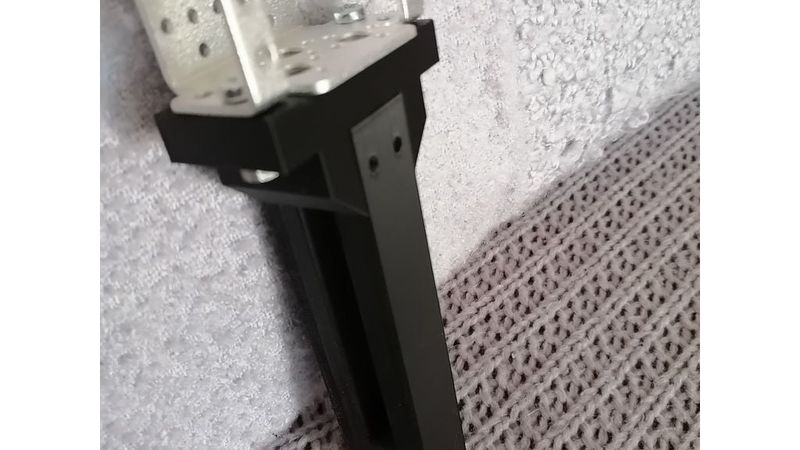
This is a simple 2 part lower leg assembly for a Robot that will allow it to interface with a readily available MG996 metal servo mount.
The Leg is fully removable from the adaptor and can be changed to suit your particular Robots needs, the rounded neoprene coated foot is ideal for a fowards facing 2 DOF quadruped leg in my instance.
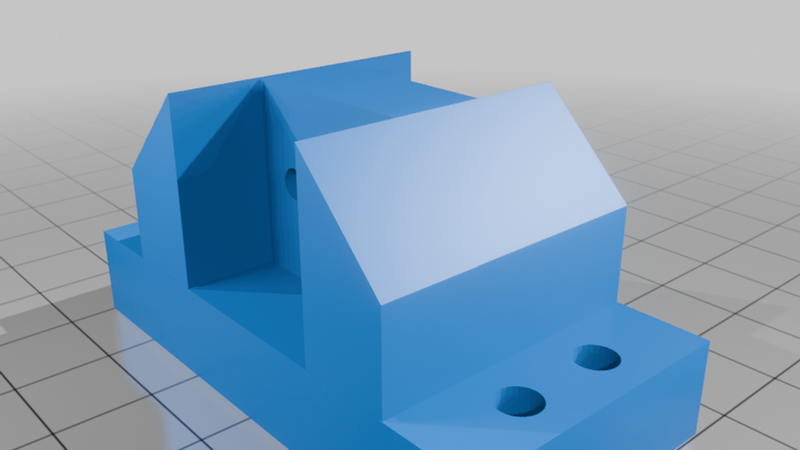
I used a 25% infill on Orca Slicer for the leg and a 30% infill for the Adaptor part.
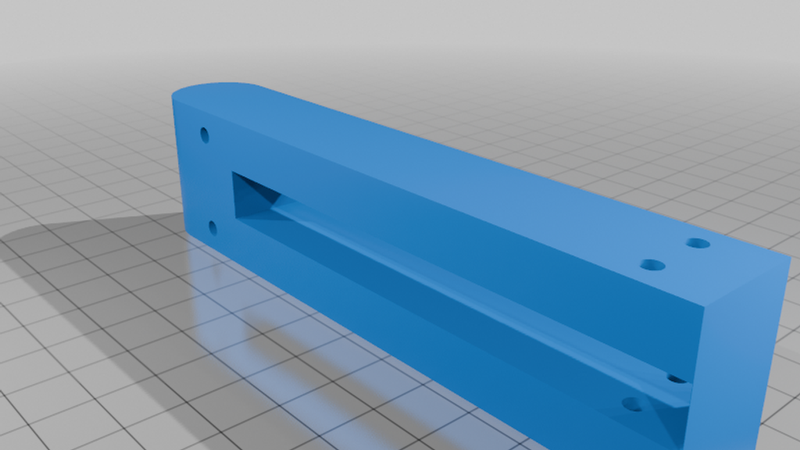
You may want to rotate the Leg part in the slicer by 90 degrees for printing without supports too.
All holes on the Leg part are M3, I used M3x25mm and M3x35mm.
The Adaptor part to Metal servo mount uses 15mmxM4 bolts.