3D Printed Walking Robot with Wi-Fi Control


Description
Overview
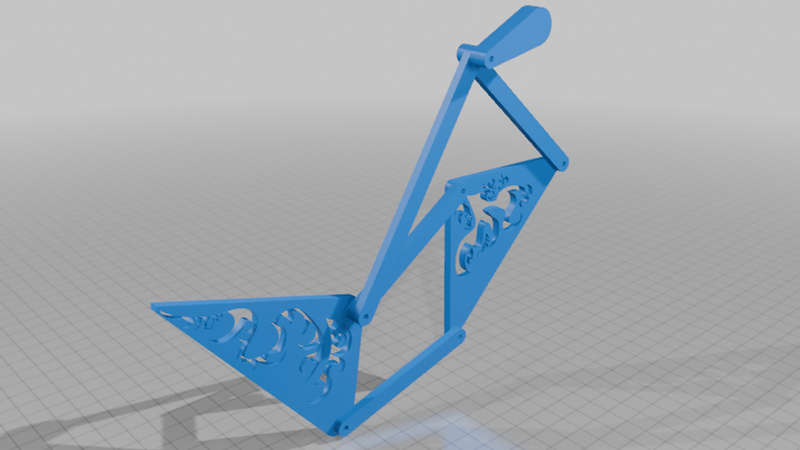
This project presents a 3D printed walking robot based on the Jansen linkage mechanism, a well-known kinematic system designed to convert rotational motion into a stable walking trajectory. The mechanism allows the robot to achieve a legged motion using a single rotary input, making it mechanically efficient and conceptually elegant.
The current version of the robot represents an early-stage prototype, developed to validate the mechanical concept, evaluate manufacturability, and identify design limitations under real operating conditions.
Design Concept
The walking system is inspired by the Theo Jansen linkage, which generates a smooth, repeating leg motion resembling natural walking. This mechanism was chosen due to its ability to produce a relatively stable gait while maintaining a simple actuation system.
The robot uses a crank-driven linkage to move multiple legs in a coordinated cycle. Particular attention was given to maintaining geometric relationships between linkage elements to preserve the intended trajectory.
Engineering Approach
The model was not only designed as a conceptual structure but also adapted for practical manufacturing and assembly. This included:
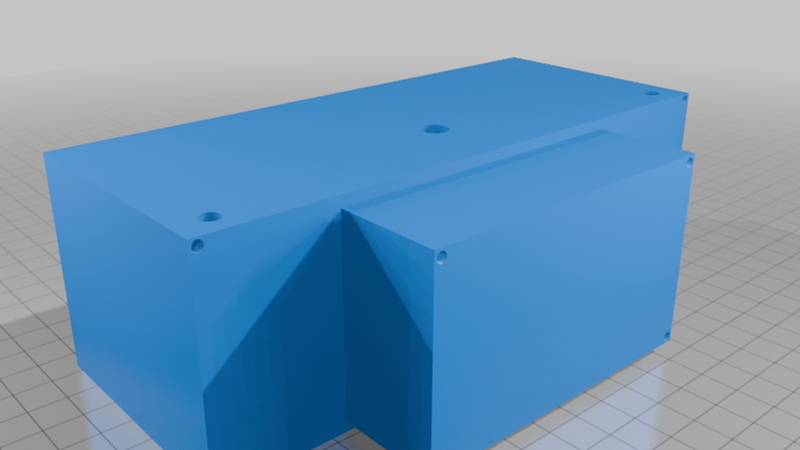
splitting the model into printable components
adjusting geometry to fit standard FDM printers
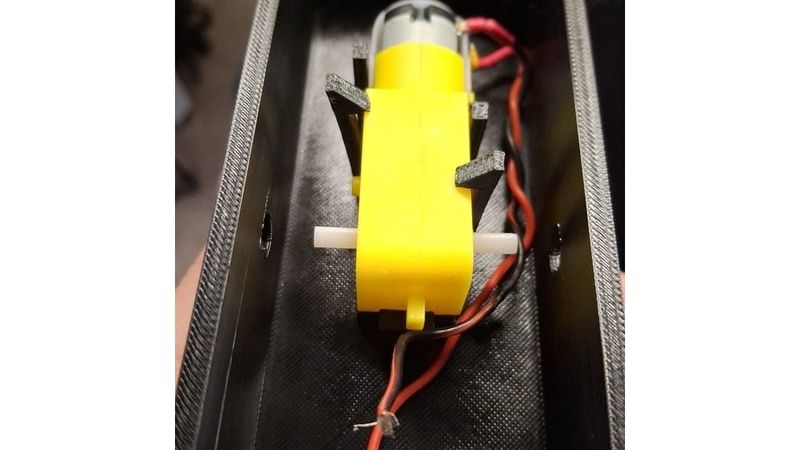
designing mounting points for motor and structural elements
integrating holes and tolerances for assembly
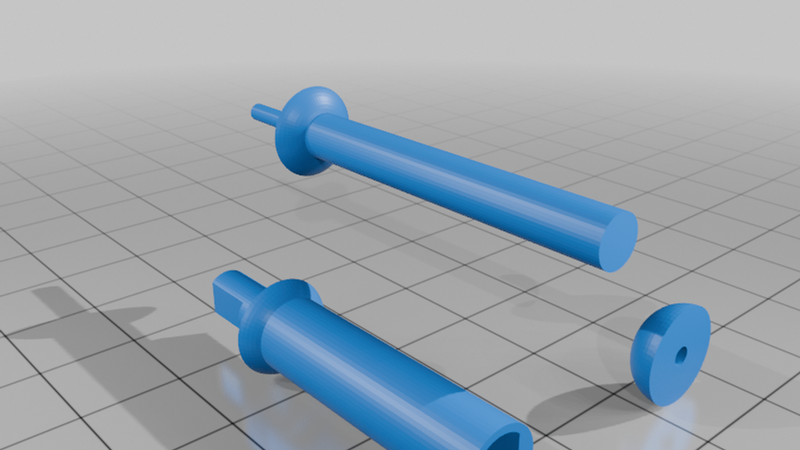
preparing joints for mechanical movement
The structure was optimized for PETG printing, balancing ease of fabrication with mechanical performance.
Prototype Nature and Development Stage
This project is intentionally presented as a functional prototype rather than a finalized product. The goal of this stage was to test the feasibility of the mechanism and identify critical design weaknesses.
As a result, the current design includes known limitations and serves as a foundation for further iterations and improvements.
Materials and Manufacturing
All structural parts are intended for FDM 3D printing using PETG filament, selected due to its good layer adhesion, impact resistance, and relatively low warping compared to ABS.
Mechanical Considerations
The project highlights several important aspects of real-world mechanical design:
1) influence of geometry on kinematic performance
2) sensitivity of linkage systems to dimensional inaccuracies
3) importance of load distribution in lightweight structures
4) limitations of polymer materials in load-bearing applications
Current Limitations
During testing, several issues were identified:
1) the presence of a “dead zone” in the linkage motion caused by geometric inaccuracies
2) insufficient torque of the geared motor to overcome critical positions
3) structural weakness of long, thin PETG elements under bending loads
These limitations emphasize the importance of precise kinematic design and structural optimization.
Future Improvements
Further development of the project may include:
1) refinement of the Jansen linkage geometry to ensure continuous motion
2) increased stiffness of structural elements
3) redesign of load-bearing connections
4) use of metal shafts or pins in rotating joints
5) improved motor selection or gearing ratio
6) better weight distribution and overall mass reduction
Files are organized into:
- Individual parts for printing
- Sub-assemblies (leg and base) for reference and visualization
Authors
Designed and developed collaboratively by:
Smirnova Tetiana - https://www.thingiverse.com/pasythe
Moroz Oleksii - https://www.thingiverse.com/moroz_oleksii