FPV drone quadcopter frame BX80
Description
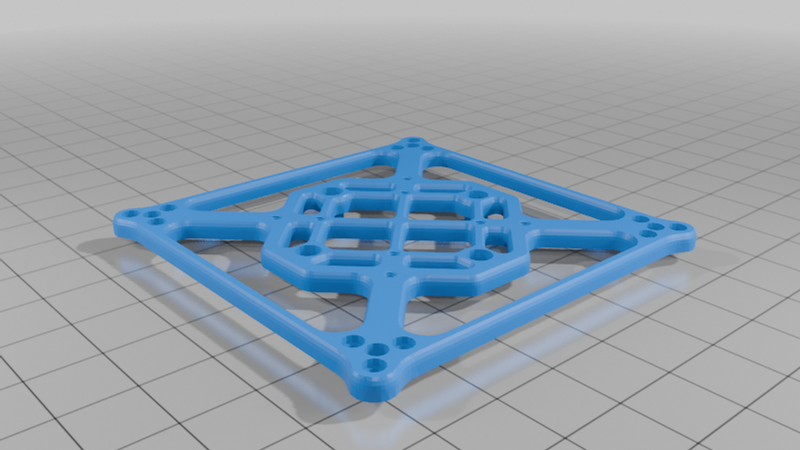
Here we are with a new version of a FPV drone frame “BX80”. This frame is designed for an 80 mm quadcopter using a DarwinFPV flight controller, and it can be easily assembled with few tools.
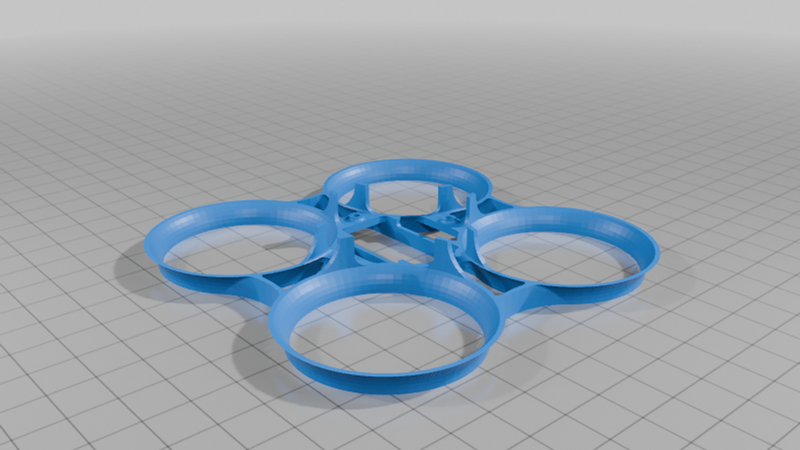
As you can see, the main frame is designed to accommodate a whoop frame, which helps increase propeller durability and efficiency (improving the airflow). In case of damage, the whoop frame can be replaced in just a few minutes by removing only four screws. The design has been optimized to reduce the total weight (about 15 g in PLA Lite) without affecting the stiffness. Particular attention was given to reducing the moment of inertia in order to improve maneuverability. By mounting the motors upside down, it was possible to position the flight controller as close as possible to the drone’s center of gravity (ready-to-fly configuration).
You'll need to print:
- 1x frame;
- 1x whoop_frame.
My advice is to print the frame parts in PLA lite (for its lightweight and good rigidity) with:
- layer height: 0.1mm;
- wall thickness: 1.2mm:
- top/bottom thickness: 1mm;
- infill: 40%
The printed parts must then be assembled with M2 screws and nuts. You can find the components list with the links (regularly updated) here below:
https://docs.google.com/spreadsheets/d/1ubEyyAePvdpqsRHqGRTsAZTnESnRkbdJPtnRT68Ka48/edit?usp=sharing
For anything else i suggest you to watch my Youtube videos (link at the end). If you have any suggestion please write them in the comments! Make sure to leave a like and a comment if you found the model useful and stay tuned for the next updates.
Link to the video (in italian): https://www.youtube.com/watch?v=M65ADJ5vY6w