Open Robotic Actuator (ORA-7) 1.5 N*m
Description
The ORA-7 (Open Robotic Actuator) is a modular, customizable robotic actuator designed for use in distributed robotic systems. It combines mechanical, electronic, and software components into a compact unit capable of precise position control and seamless integration into multi-node architectures.
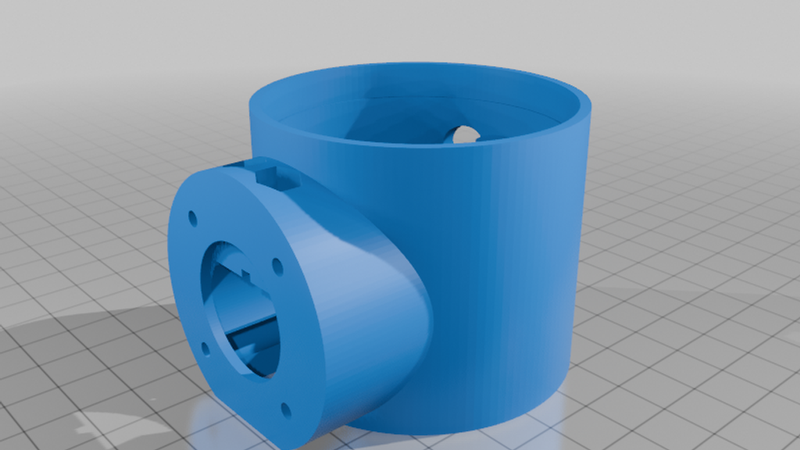
This manual provides a complete guide to assembling the ORA-7 actuator, starting from the bill of materials and 3D-printed components, through mechanical and electronic assembly, and finishing with software setup and control. The actuator is based on a modified DS3240 servo, enhanced with an external motor driver (DRV8871), an Arduino Pro Mini controller, and an encoder interface to enable closed-loop control and communication over the OSP (Open Serial Peripheral) protocol.
A key feature of the ORA-7 system is its support for ring topology, allowing multiple actuators to be daisy-chained and controlled via a single OSP controller. This makes it particularly suitable for scalable robotic systems such as manipulators, modular robots, and distributed motion platforms.
The document is intended for engineers, developers, and robotics enthusiasts who want to build, understand, and integrate ORA-series actuators into their systems.
The Assembly documentation with the Bill of Materials is available in PDF format and attached to this thing.
Specs:
Dimensions: 72x62x76 mm
Shaft Diameter: 49 mm
Weight: 0.152 kg
Max Torque: 4.0 N*m
Continuous Torque: 1.5 N*m
Positioning Precision: +/- 1°
Measurement Precision: +/- 0.3 °
The load test video is available here: https://www.youtube.com/watch?v=X9s3OmY1GqE