Line follower with adjustable sensor holder

Description
3D model description
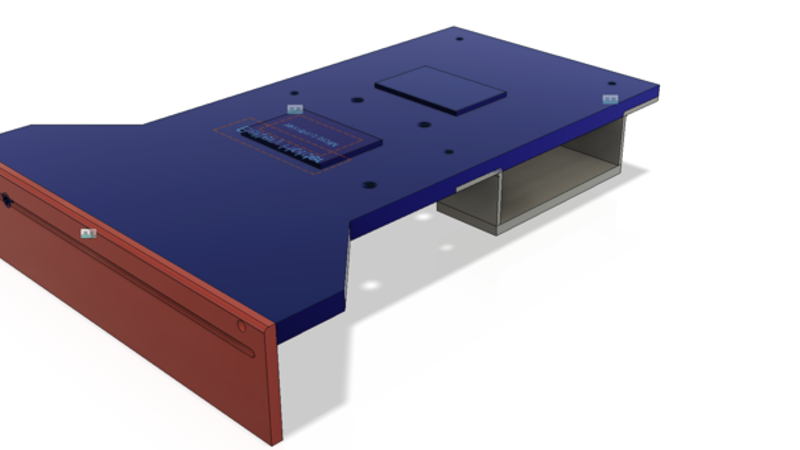
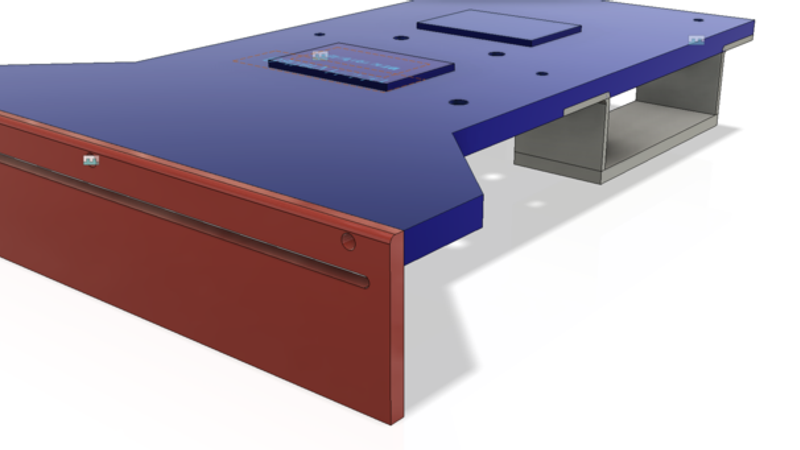
🔧 Adjustable Line Follower Robot Chassis (BO Motor Compatible)
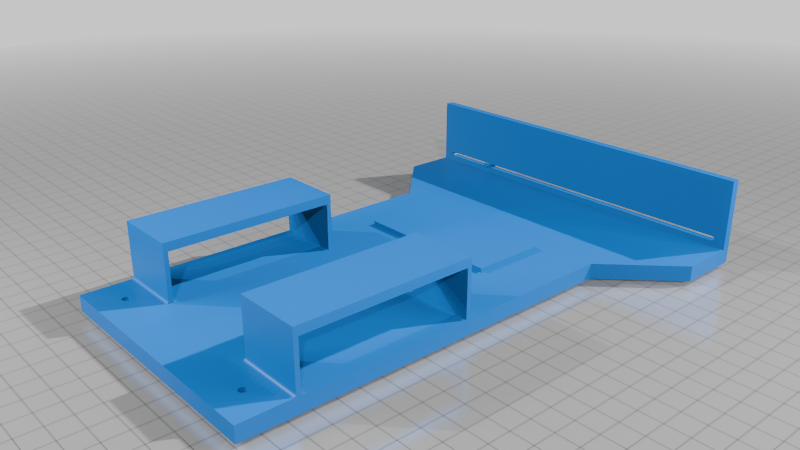
This is a fully functional and modular robot chassis designed for line follower and basic robotics projects. The design focuses on flexibility, ease of assembly, and compatibility with commonly available components.
🚀 Features:
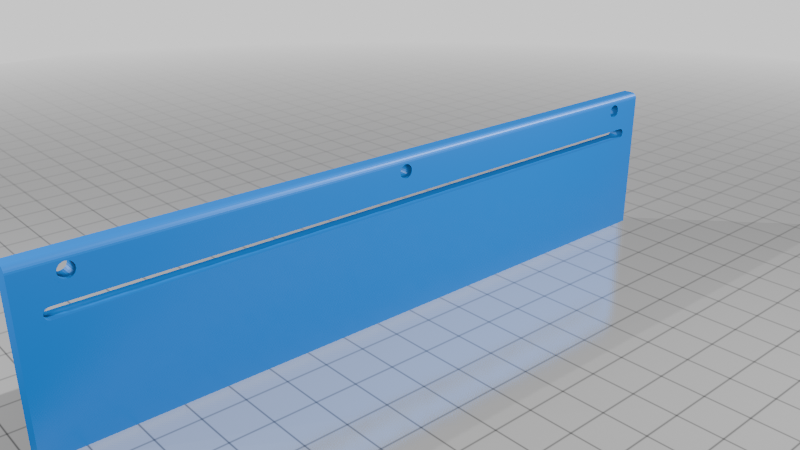
🔹 Adjustable IR sensor holder with sliding slot
🔹 Compatible with standard BO motors (100–300 RPM range)
🔹 Universal battery mounting area (zip-tie compatible)
🔹 Dedicated space for motor driver (L293D) and microcontroller
🔹 Modular design for easy assembly and customization
🔹 Lightweight and strong structure
🧩 Components Included:
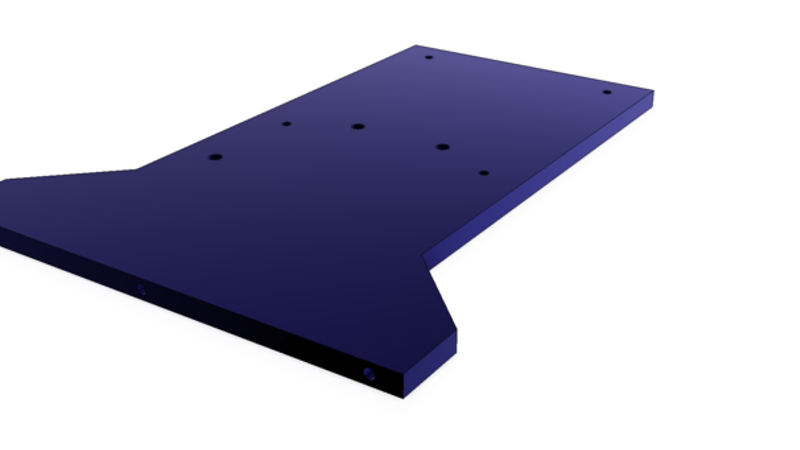
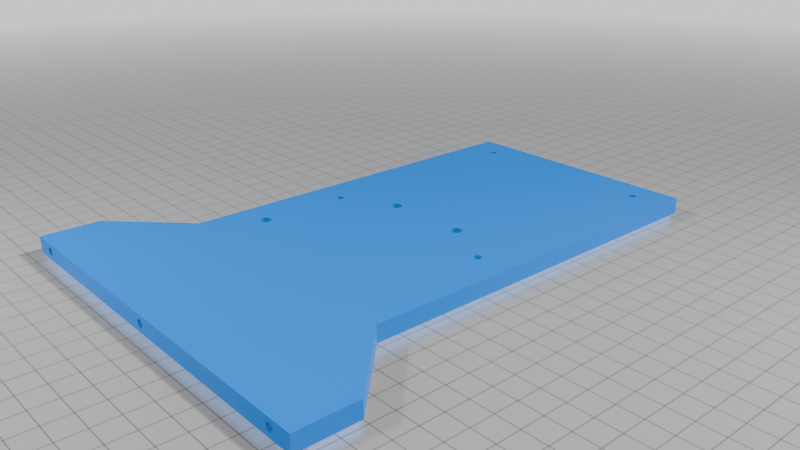
Robot chassis
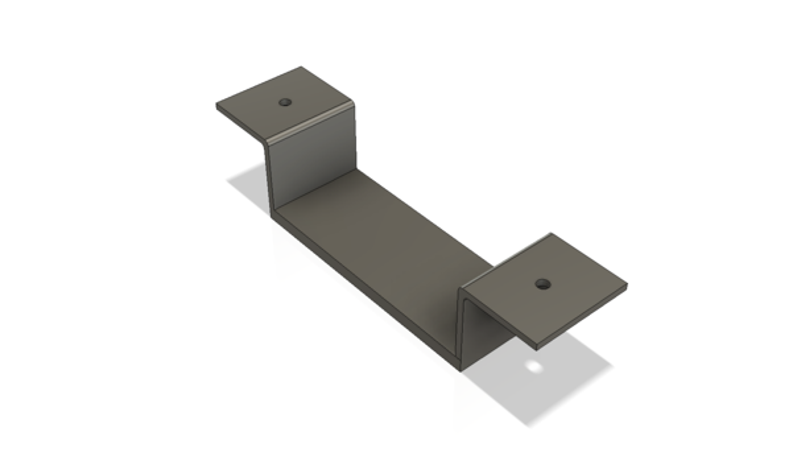
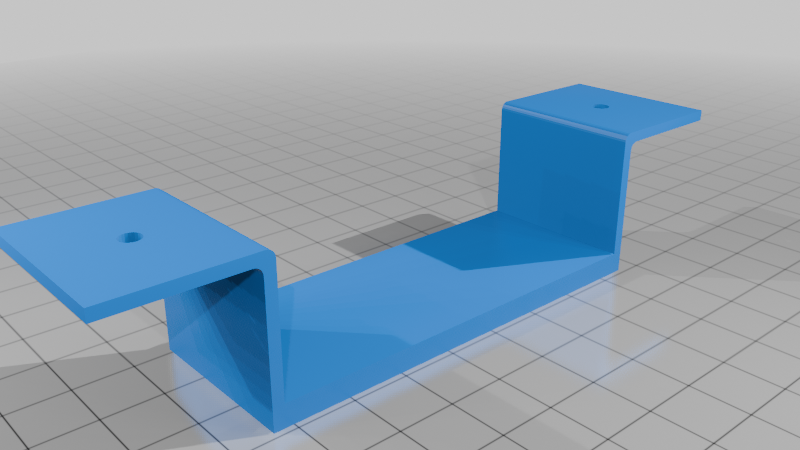
Motor holder (2x)
Adjustable sensor holder
⚙️ Hardware Required:
M3 screws and nuts
BO motors (2x)
IR sensors
Motor driver (L293D or similar)
Microcontroller (Arduino / ESP32)
Battery (any type, secured using zip ties)
🛠️ Assembly:
Fix motors into holders
Attach holders to chassis
Mount sensor using slot mechanism
Install electronics in dedicated spaces
Secure battery using zip ties
📌 Notes:
Designed with tolerance for easy fitting
Suitable for beginners and students
Can be modified further using provided STEP file
💡 Perfect for robotics projects, competitions, and learning purposes.
3D printing settings
🖨️ Recommended 3D Printing Settings
Material: PLA (recommended) / PETG
Layer Height: 0.2 mm
Infill: 20–30%
Wall Thickness: 1.2–1.6 mm
Print Speed: 40–60 mm/s
Supports: Not required (for most parts)
Bed Adhesion: Skirt or Brim
🔧 Printing Tips:
Print chassis flat on bed
Print motor holders upright for better strength
Ensure proper bed leveling for slot accuracy
Use higher infill (30%) for motor holders if needed
⚠️ Tolerances:
Designed with slight clearance for easy assembly
If fit is tight, lightly sand the parts
📦 Post Processing:
Clean edges if needed
Test fit components before final assembly