ArgusFPV ROC WING VTOL Mods - DJI O4 Pro + Pan Servo + Insta360 X5 + More!






Description
<b>A collection of my personal mods for the versatile ArgusFPV ROC WING VTOL!</b>
<b>Features</b>
- <b>All parts are provided in both STEP and STL format.</b>
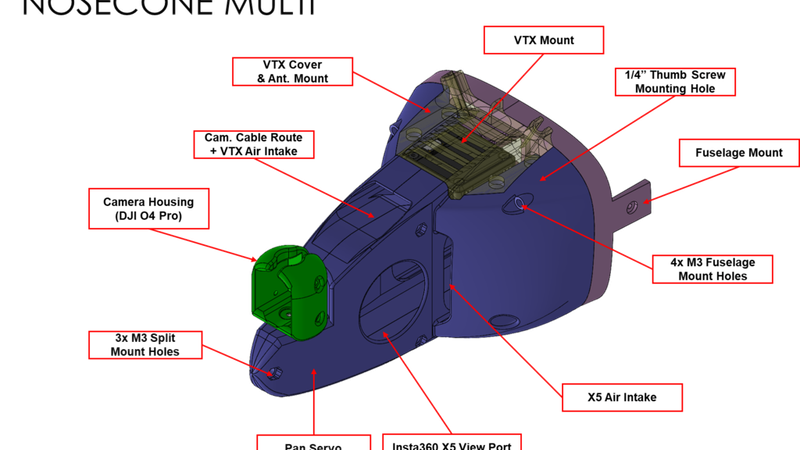
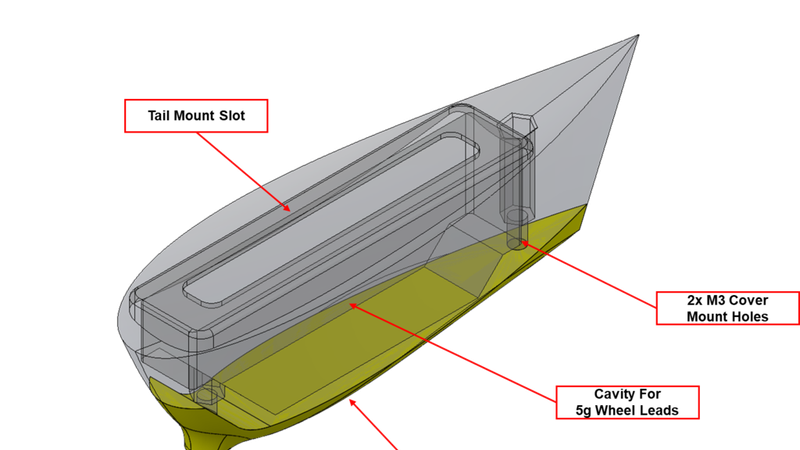
- <b>Nosecone Multi (NCM) and Tail Counterweight (TCW)</b>
- <b>Obstruction-free frontal hemisphere view</b> with Insta360 X5 (~3π steradian clearance). Enjoy post-flight edits!
- <b>Integrated air intake for cooling VTX & Insta360 X5.</b>
- <b>Optional pan servo mounting(requires additional H/W).</b> Detailed instruction plus custom Lua script is provided with the attached manual.
- <b>Low-drag, streamlined tail ballast attachment,</b> which doubles as a durable tail landing gear.
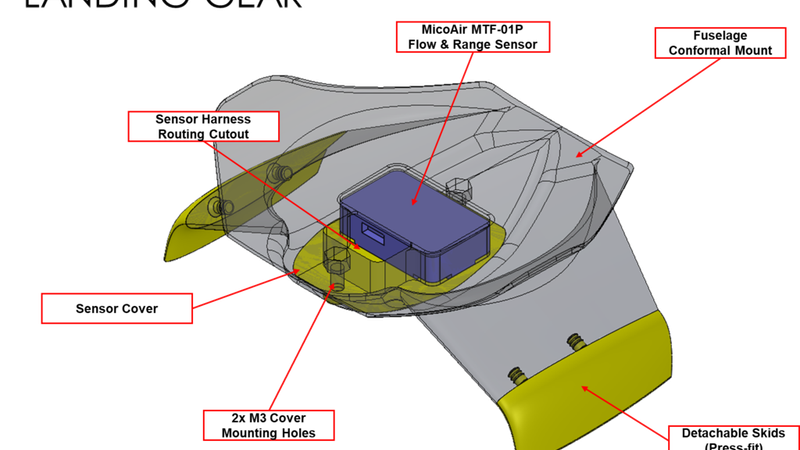
- <b>Landing Gear (LG)</b>
- <b>Conformal attachment</b> with slot for mounting <b>MicoAir MTF-01P flow sensor & range finder</b>, improving low altitude hovering accuracy.
- <b>Detachable, press-fit skids</b> for easy cleaning and repairing post-landing.
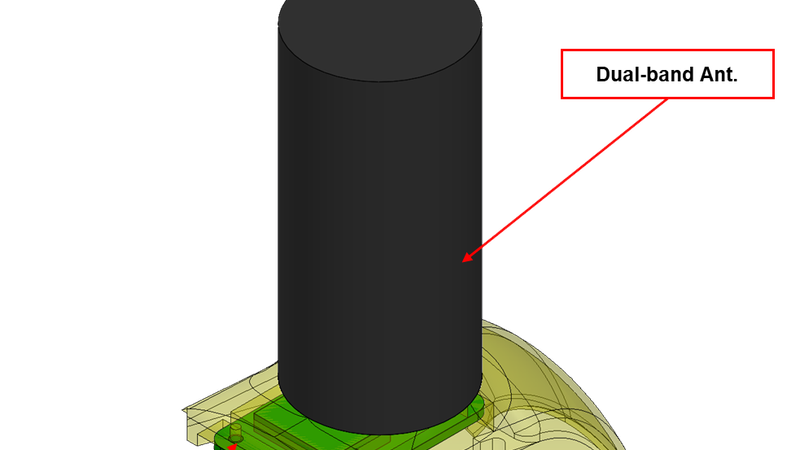
- <b>GPS Mount for MG-F10 (GM)</b>
- <b>Streamlined mount for MicoAir MG-F10 dual band GNSS,</b> a worthy upgrade for the lovely ROC WING VTOL!
- <b>Other parts are for enhancements and repair,</b> such as battery plate(BP), enlarged harness route(HR-XL), etc.
<b>Assembly Instructions</b>
- <b>DETAILED MANUALS ARE PROVIDED AS ZIP FILES</b> for step-by-step guide for NCM + TCW, LG parts.
- For other parts, no manuals were deemed necessary; please check the photos for reference.
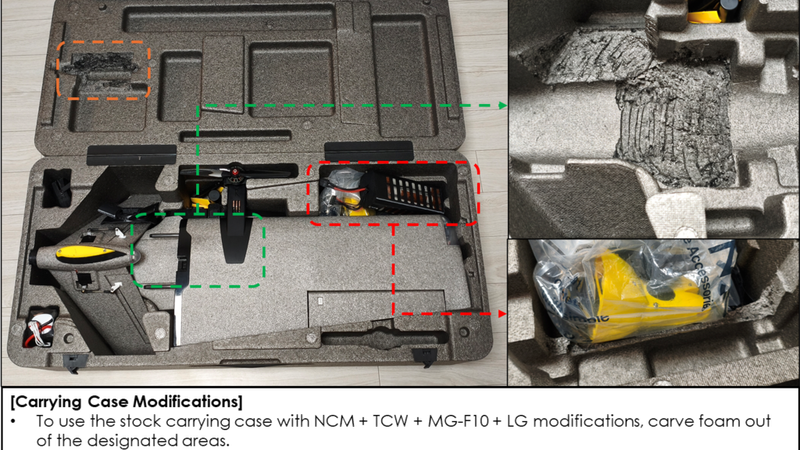
- <b>To use the stock carrying foam case,</b> refer to the attached photo for foam cutout locations.
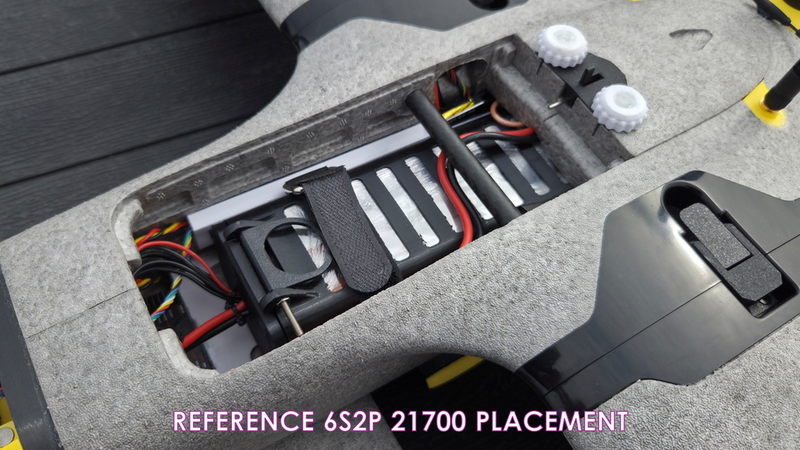
- Check the attached photo for reference battery position for 6S2P 21700 setup.
<b>Bill of Materials</b>
- <b>Nosecone Multi (NCM)</b>
- 2x M3 30mm bolt
- 1x M3 10mm bolt
- 4x M3 35mm bolt
- 7x M3 nut
- 6x M2 bolt (for cam & VTX mount, likely included with VTX)
- 8x 6mm round neodymium magnet
- 1x 9g pan servo
- 1x 150mm XT60 extension cord
- 1x 1/4" thumb screw (for Insta360 X5 mounting)
- 1x 16ch SBUS-PWM decoder (optional)
- 1x 5V UBEC (optional)
- <b>Tail Counterweight (TCW)</b>
- 2x M3 25mm bolt
- 2x M3 nut
- Multiple 5g wheel leads (exact amount depends on the setup)
- <b>Landing Gear (LG)</b>
- 2x M3 10mm bolt
- 2x M3 nut
- <b>GPS Mount (GM)</b>
- 4x M2 screw
<b>Printing</b>
- <b>'NCM_MOUNT', 'TCW_MAIN' and 'LG_FS_MAIN':</b> TPU, 2 wall, 10% infill (adaptive cubic)
- <b>FOR ALL OTHER PARTS:</b> any material(PETG for reference), 2 wall, 10% infill (adaptive cubic)
- Use provided orientations. <b>TPU parts can be printed with any impact-resistant materials.</b>
<b>Reference Configuration</b>
- Flight Controller: ArgusFPV Stock
- ESC: 3x Stock 30A ESC
- Motor: Stock
- Prop: HQ Props 8x4
- Battery: 6S2P 21700 10Ah (Molicel P50B)
- GPS: MicoAir MG-F10 Dual Band
- Peripheral: MicoAir MTF-01P Flow Sensor & Range Finder, MicoAir LR900-P TLM, Insta360 X5
- RC RX: RadioMaster RP4-TD
- VTX: DJI O4 Pro
- AUW: ~2700g
<b>Reference Performance</b>
- Cruise speed: 24m/s (~86km/h<b>(A)</b>)
- Max speed: 55m/s (~200km/h, 45deg dive)
- Minimum (VTOL transition) speed: 14m/s (~50km/h)
- Cruise range / Endurance: >60km / 0.8hour (10% battery margin<b>(B)</b>)
<b>(A):</b> I deliberately use high cruise throttle setting to punch through west wind. For maximum endurance, target 18m/s (~65km/h) cruise speed.
<b>(B):</b> The record is with full modifications setup.