Robot Gripper with Pistol Grip | No Support

Description
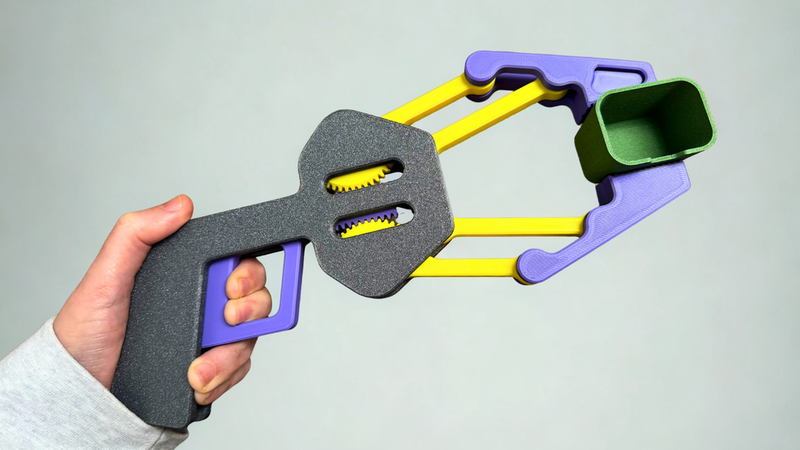
Trigger operated robot grabber. The jaws always stay parallel thanks to 4-bar linkages. The trigger operates a double rack and pinion system to open and close the jaws. Prints without support, and assembly is simple and quick. Download yours and you will never have to grab things with your own hands again!
Why This Design Is Awesome:
4-Bar Linkage System - True parallel jaw motion
Rack & Pinion Trigger - Smooth mechanical control
Pistol Grip Design - Comfortable one-handed operation
No Supports Required - Clean prints with no cleanup
Intuitive Operation - Push forward to open, pull back to close
Complete Build Guide
Want the full breakdown? Print settings, assembly walk-through, and a deep dive into how the mechanism works—check out our YouTube video: https://youtu.be/oGIzqg5BPuQ
Help Us Keep Making Cool Stuff
If you like this design, subscribe to our YouTube channel at https://www.youtube.com/@MacshayCreations. Your support keeps us cranking out free STL files for the community. More subscribers = more builds, more designs, more free downloads.
For STL licensing options, check out our Patreon: https://patreon.com/MacshayCreations