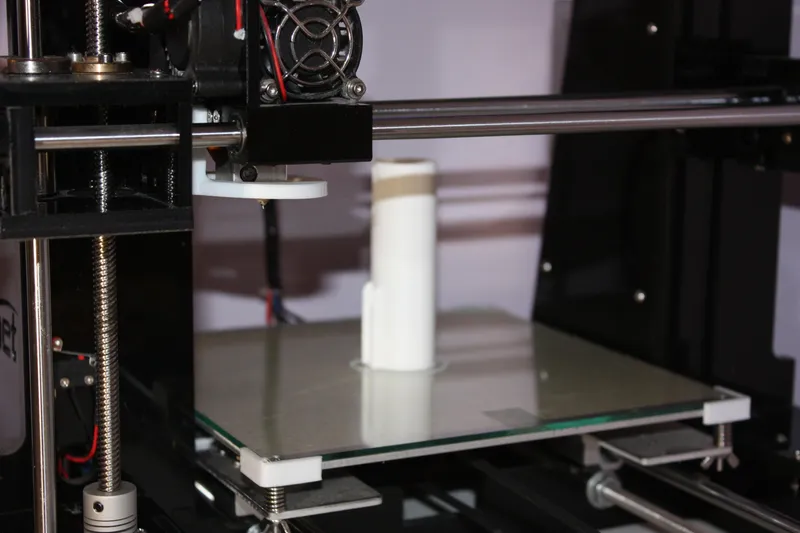
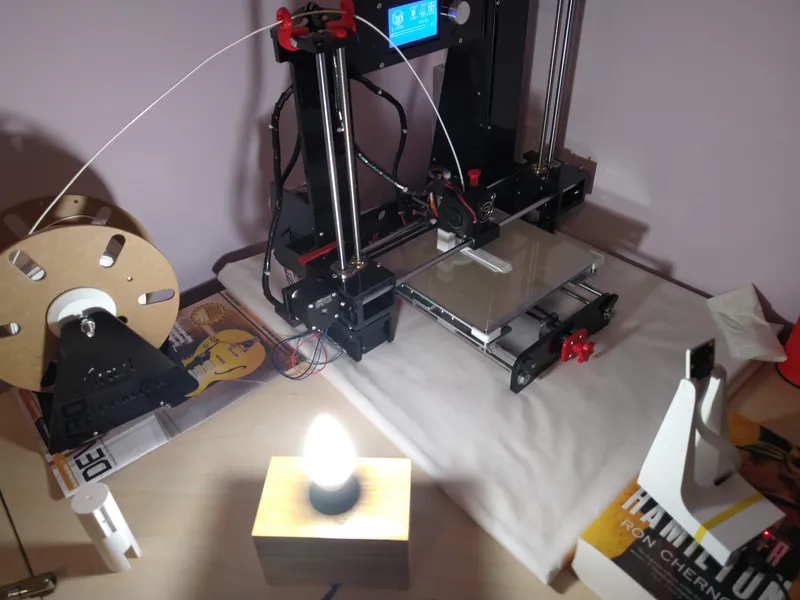
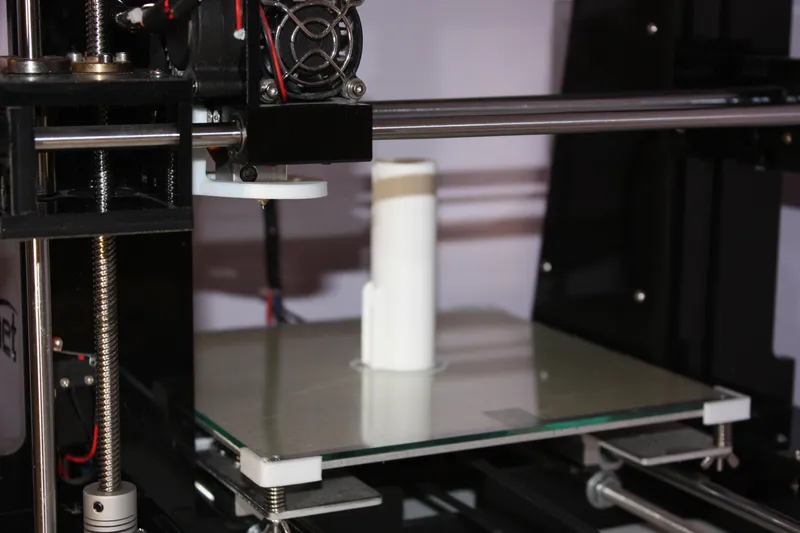
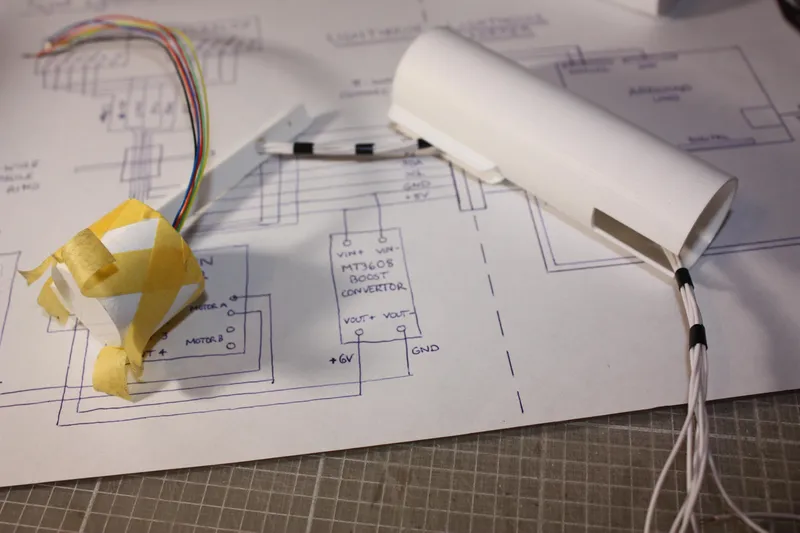
Plastics (and 3D printing) are what makes this project possible! The plastic we use is PLA (polyactic acide, a starch-derived plastic commonly used for 3D printing filament). FDM (fused deposition modelling, the fancy way to describe the filament type printing used in most amateur 3D printers) is an amazingly low-cost way to be able to create high quality and low cost components, without which we couldn't do this! Making these components another way would be undeniably slower, trickier, and more expensive. The 3D printer I use is an Anet A6, a low cost machine, but more than capable of projects like this one.
The Design
The key drivers in my design were:
• Low cost - the total price of the components should be as low as possible.
• Minimal size - a focus on maintaining the smallest dimensions possible.
• Performance - a near 360° coverage and fast scanning rate.
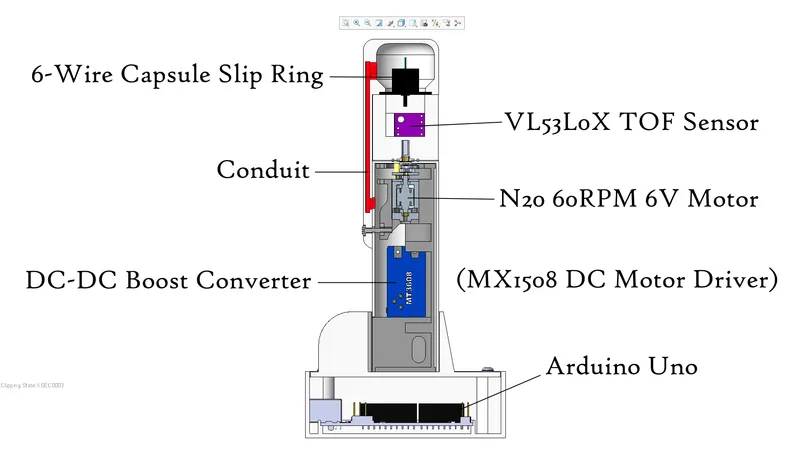
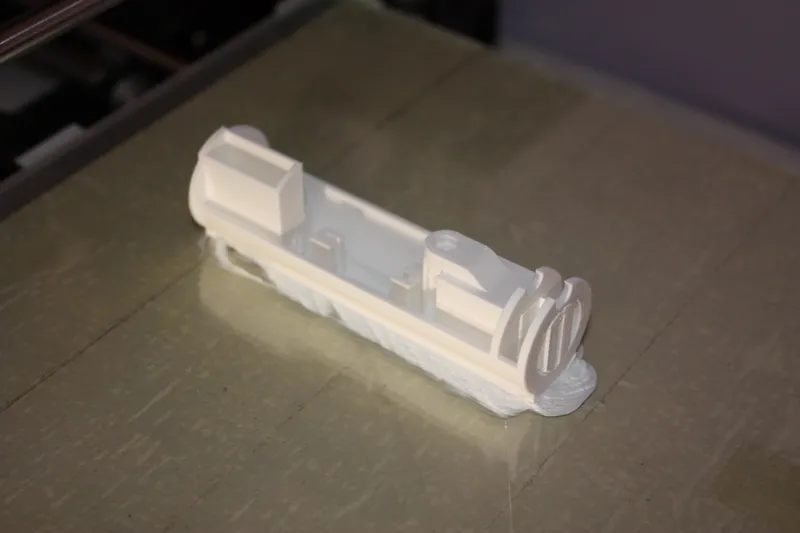
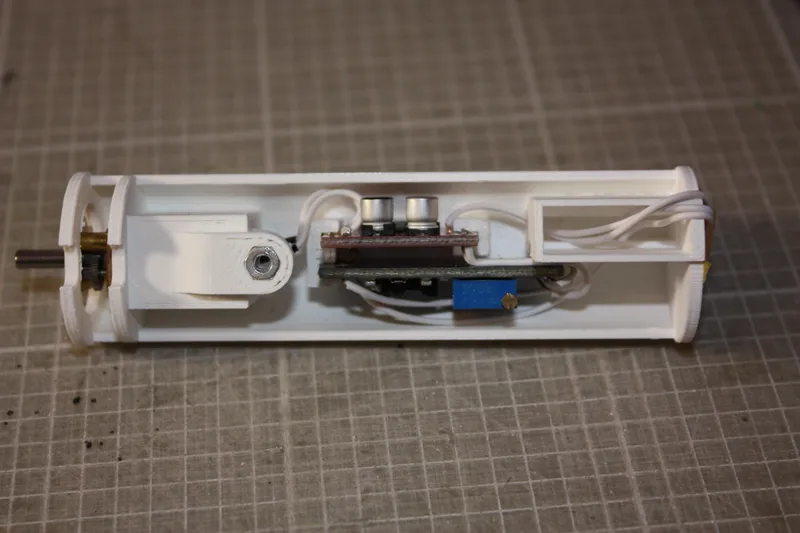
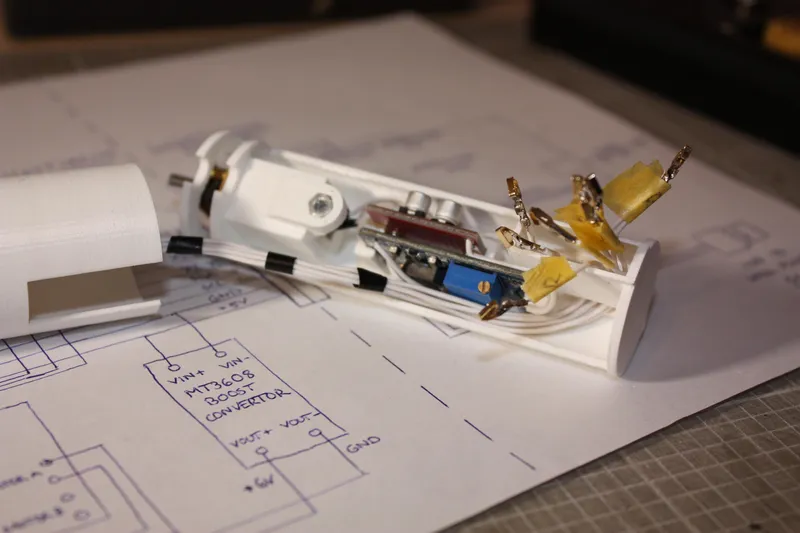
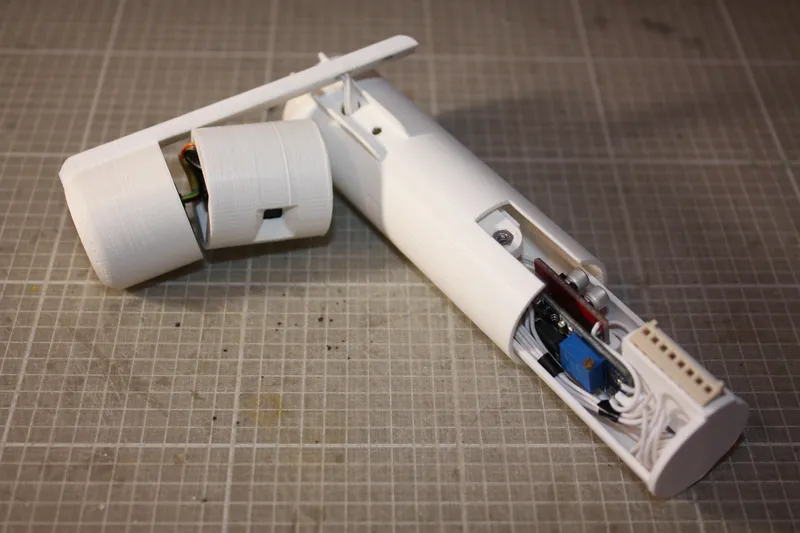
Basic and widely-available components are used throughout, and cost is minised by the omission of any form of encoder. This would be use to measure the rotational angle of the scanning head. Instead, a pillar is within the scanning arc of the sensors; from this the rotational angle of the head can be calculated by recording when the sensor detects the presence of the pillar, and then calculating the rotational speed and hence angular interval between distance measurements.
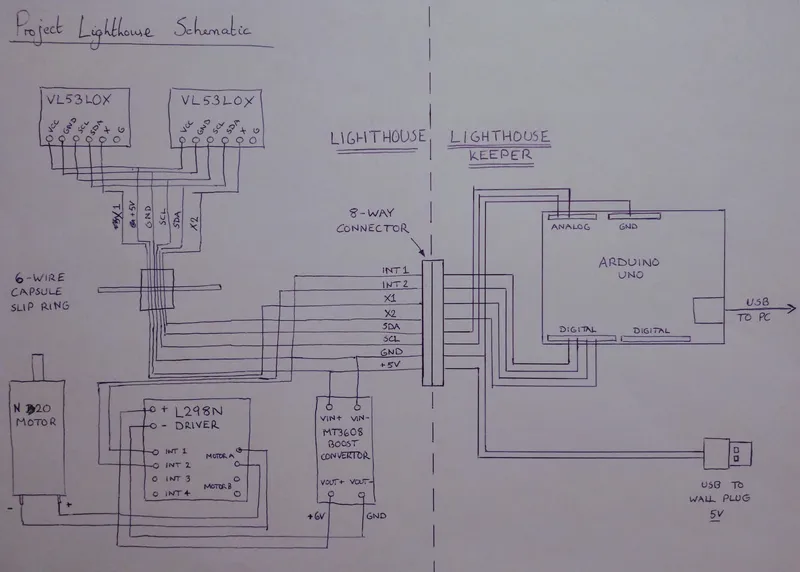
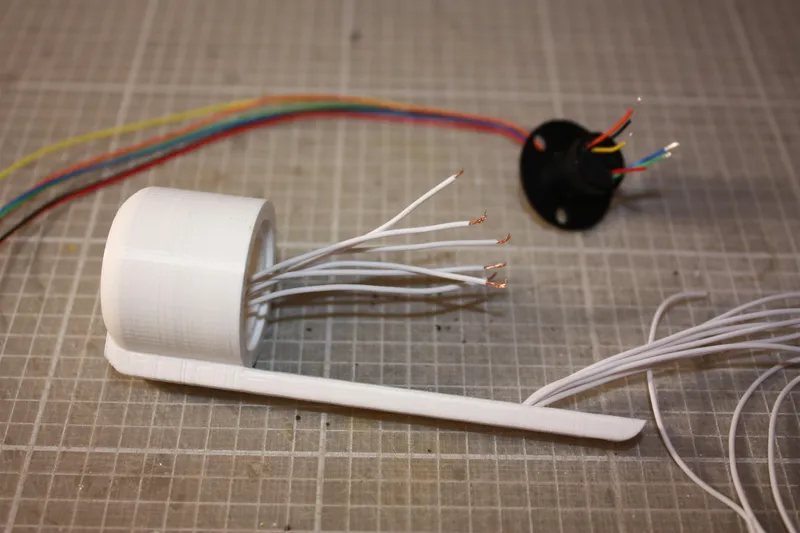
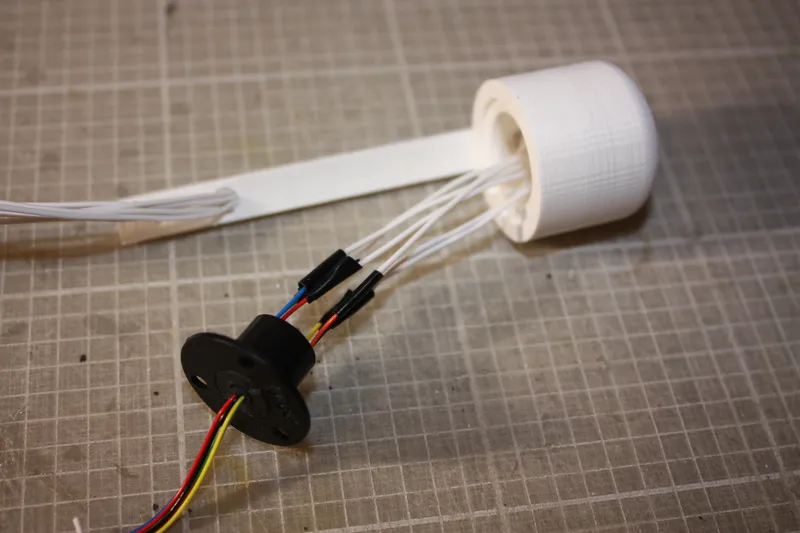
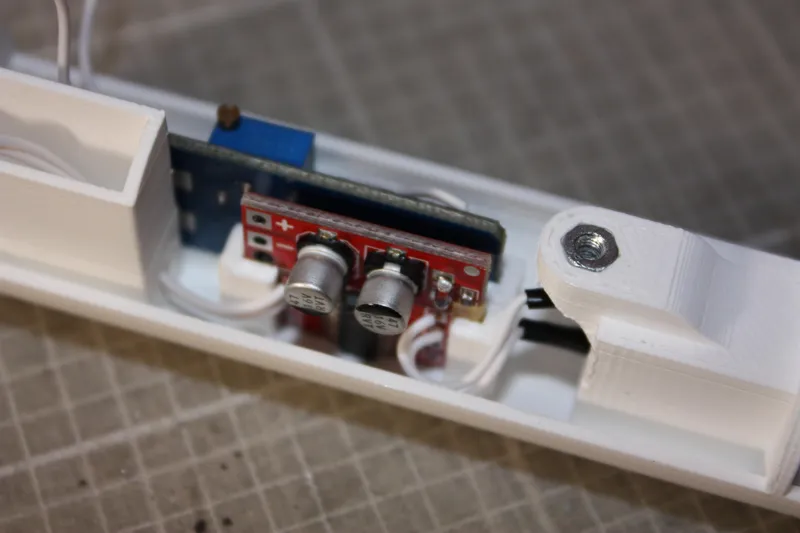
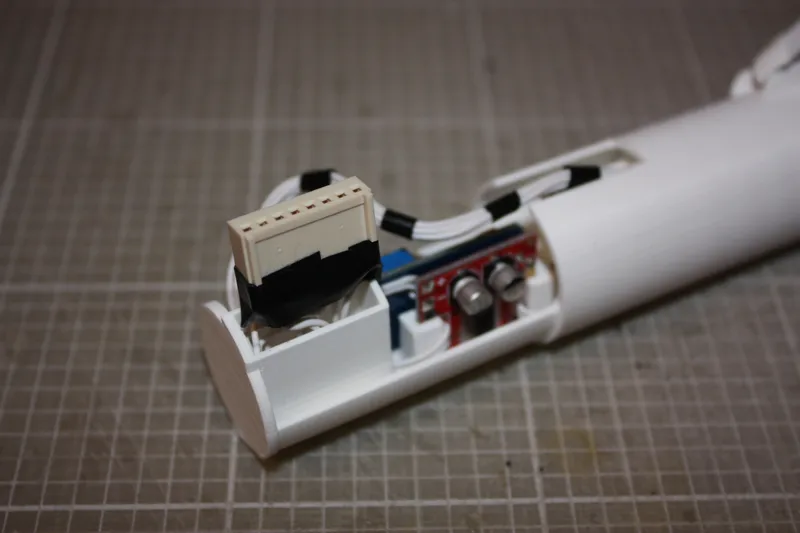
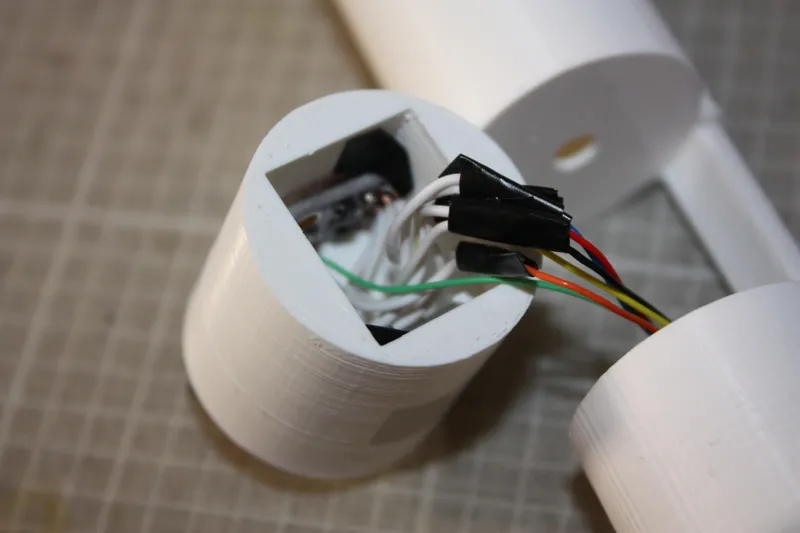
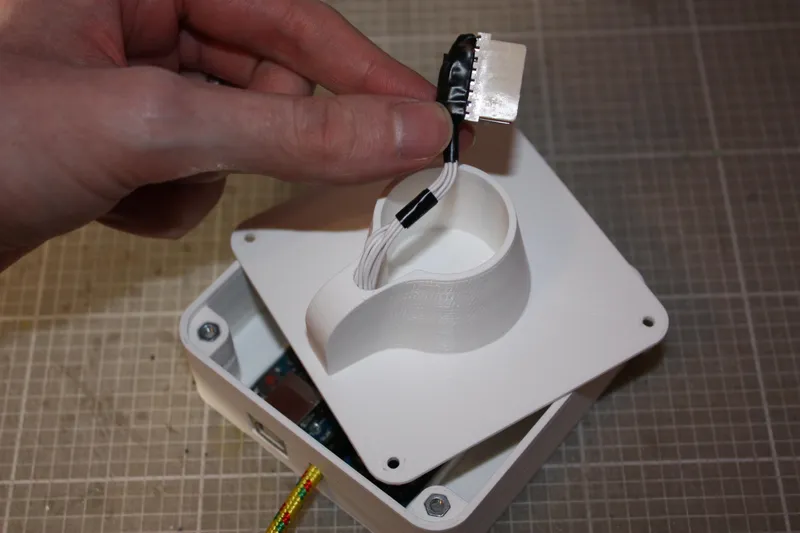
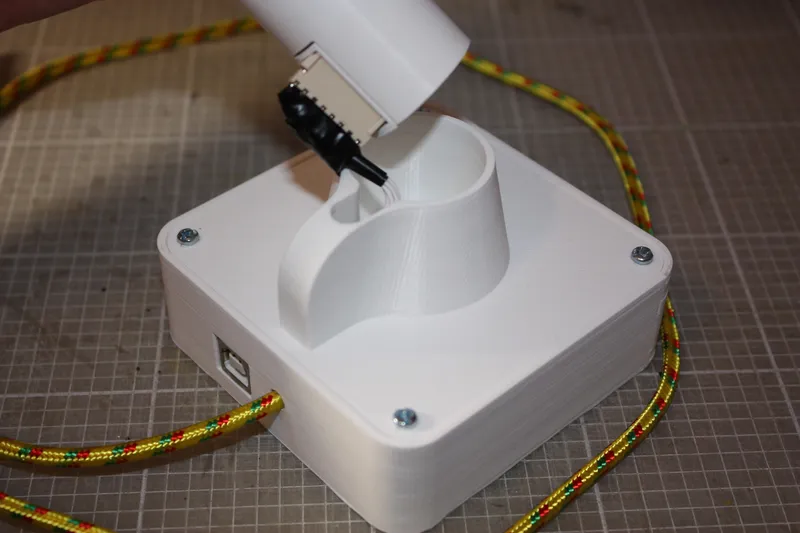
A 'slip ring' is a component that allows an electrical connection to be made through a spinning interface, and we use a 6-wire capsule slip ring to take the connections from the two sensors down into the body of the LiDAR tower. By relocating the slip ring to above the spinning head, and then using the pillar to route the wires down into the tower, a very simple layout is created, which utilises a small number of components.
Why a LiDAR?
|||/BOLD|||I've wanted to make a spinning distance sensor for a few years since I worked on some basic wheeled robots. I didn't have the ability to design one then, but I've toyed with the design more and more in the last few months, and decided to at last make it happen!
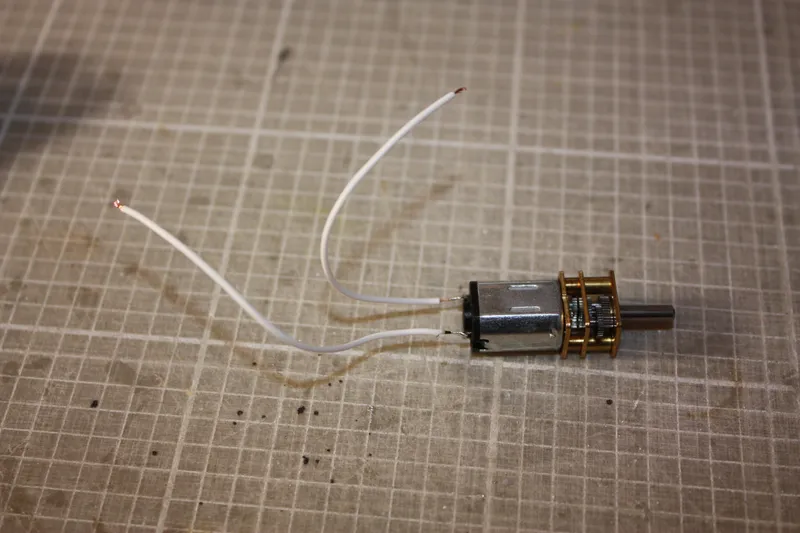
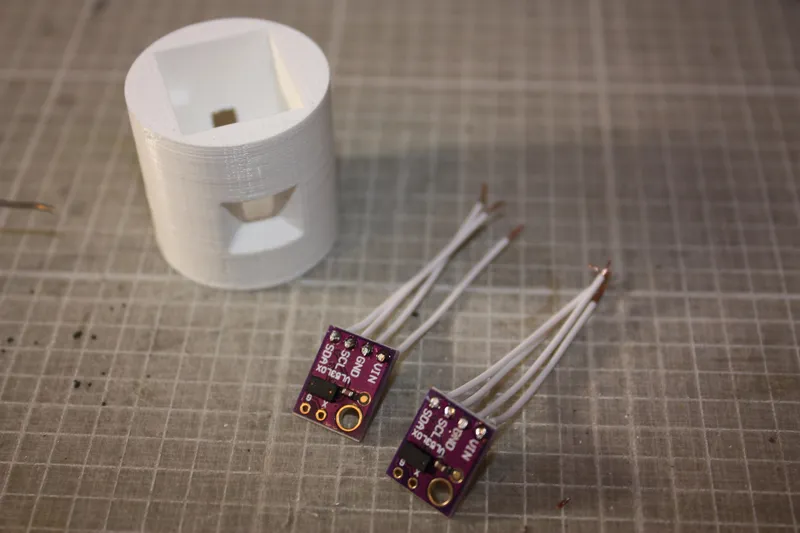
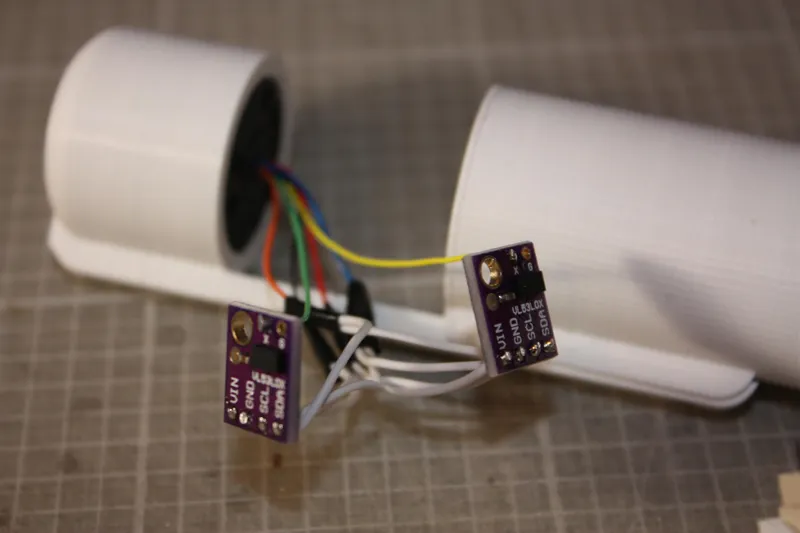
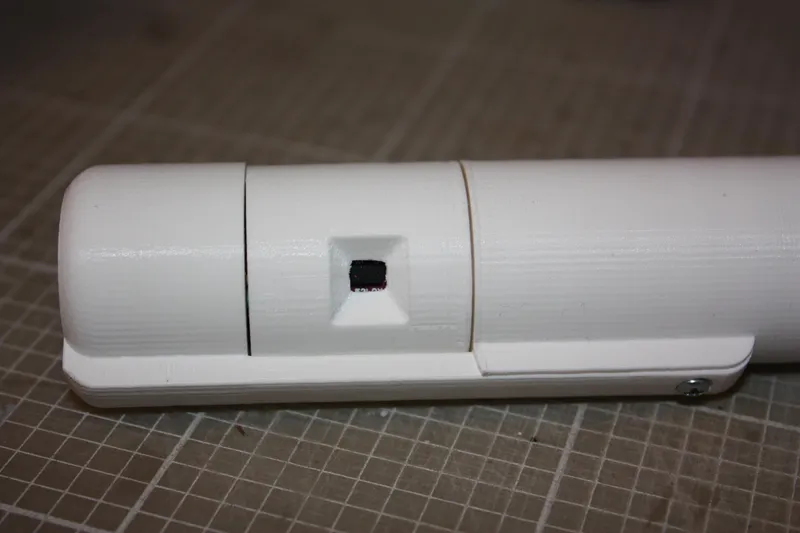
Previously I've used basic fixed ultrasonic (HC-SR04) and IR (Sharp series) sensors for distance sensing, but never a spinning sensor before. The commercially available spinning LiDAR sensors are quite expensive for me, so I wanted to try and develop a basic one for a very minimal cost. If successful, I planned to use this sensor for navigation of small robots, as well as room mapping.The VL53L0X sensors I chose to use have a wavelength of 940nm, invisible to the human eye but a smartphone camera will show a bright flash!
There are some very good YouTube videos on similar projects that I found inspiring, in particular this video by Electronoobs. 3D View!
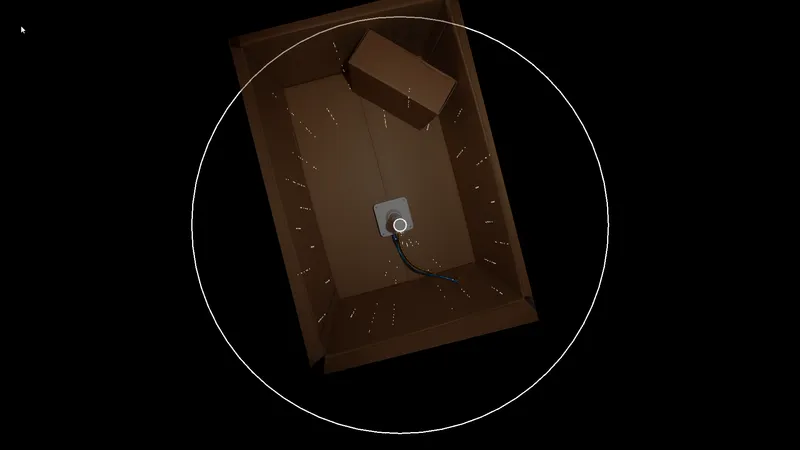
|||/BOLD|||It may take a moment to load, but I included this Tinkercad 3D view so you can look at the model yourself: